

CMU’s Autonomous Expedition Study Group has actually established a collection of robot systems and organizers making it possible for robotics to check out faster, probe the darkest edges of unidentified atmospheres, and develop even more exact and topographic maps– all without human assistance.
By Aaron Aupperlee
A study team in Carnegie Mellon College’s Robotics Institute is producing the future generation of travelers– robotics.
The Autonomous Exploration Research Team has actually established a collection of robot systems and organizers making it possible for robotics to check out faster, probe the darkest edges of unidentified atmospheres, and develop even more exact and topographic maps. The systems enable robotics to do all this autonomously, locating their method and producing a map without human treatment.
” You can establish it in any kind of atmosphere, like a chain store or a household structure after a calamity, and off it goes,” stated Ji Zhang, a systems researcher in the Robotics Institute. “It develops the map in real-time, and while it discovers, it determines where it wishes to go following. You can see whatever on the map. You do not also need to enter the room. Simply allow the robotics check out and map the atmosphere.”
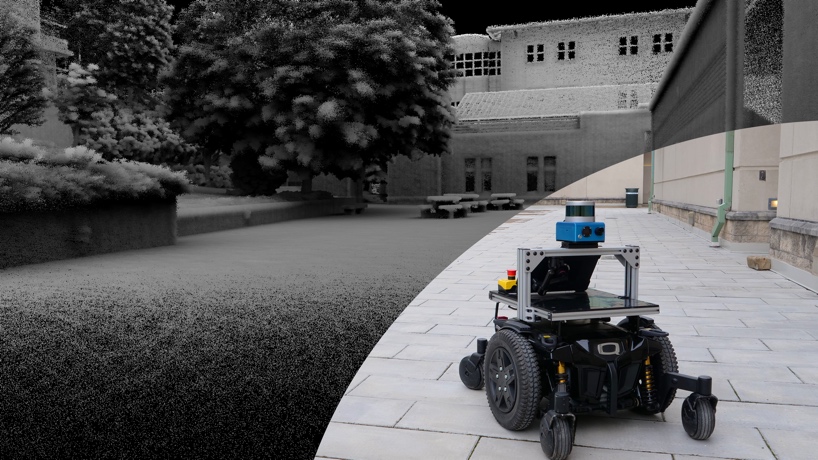
The group has actually serviced expedition systems for greater than 3 years. They have actually discovered and mapped numerous below ground mines, a parking lot, the Cohon University Center, and numerous various other interior and outside places on the CMU university. The system’s computer systems and sensing units can be affixed to virtually any kind of robot system, changing it right into a contemporary traveler. The team makes use of a changed mechanized mobility device and drones for much of its screening.
Robotics can check out in 3 settings utilizing the team’s systems. In one setting, an individual can manage the robotic’s activities and instructions while self-governing systems maintain it from collapsing right into wall surfaces, ceilings or various other things. In an additional setting, an individual can choose a factor on a map and the robotic will certainly browse to that factor. The 3rd setting is pure expedition. The robotic triggers by itself, checks out the whole room and develops a map.
” This is a really adaptable system to utilize in several applications, from distribution to search-and-rescue,” stated Howie Choset, a teacher in the Robotics Institute.
The team incorporated a 3D scanning lidar sensing unit, progressive electronic camera and inertial dimension device sensing units with an expedition formula to make it possible for the robotic to recognize where it is, where it has actually been and where it ought to go following. The resulting systems are considerably much more reliable than previous strategies, producing even more total maps while lowering the formula run time by fifty percent.
The brand-new systems operate in low-light, treacherous problems where interaction is erratic, like caverns, passages and deserted frameworks. A variation of the team’s expedition system powered Team Explorer, an access from CMU and Oregon State College in DARPA’s Below ground Obstacle. Group Traveler positioned 4th in the last competitors however won one of the most Industries Discovered Honor for mapping even more of the path than any kind of various other group.
” Every one of our job is open-sourced. We are not holding anything back. We wish to enhance culture with the abilities of structure self-governing expedition robotics,” stated Chao Cao, a Ph.D. trainee in robotics and the lead driver for Group Traveler. “It’s a basic ability. When you have it, you can do a whole lot much more.”
The team’s latest job showed up in Scientific Research Robotics, which released “Representation Granularity Enables Time-Efficient Autonomous Exploration in Large, Complex Worlds” online. Previous job has actually obtained leading honors at respected robotics meetings. “TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments” won the very best Paper and Finest Solutions Paper honors at the Robotics Scientific Research and Solution Meeting in 2021. It was the very first time in the seminar’s background that a paper obtained both honors. “FAR Planner: Fast, Attemptable Route Planner Using Dynamic Visibility Update” won the very best Trainee Paper Honor at the International Meeting on Intelligent Robots and Solutions in 2022.
Even more info is readily available on the group’s website.
发布者:Carnegie Mellon University,转转请注明出处:https://robotalks.cn/enabling-autonomous-exploration/