
At Dexterity Robotics, we are dealing with our humanoid robotic Figure, which stabilizes proactively in any way times, can recoup from unanticipated bumps, and can raise and relocate hefty points. There are 28 levels of flexibility and many sensing units. That’s a great deal of details to absorb, and a great deal of actuators to work with, for complicated activities that require to be chosen in actual time.
Every activity or call with the atmosphere, like comprehending a doorknob, can be really felt at every joint of the robotic and influences exactly how the legs must stabilize the whole point.
So allow’s begin by discussing both significant methods to regulating a vibrant robotic such as this:
- Utilizing a model-based controller
- Utilizing a discovered controller
Oftentimes. the company utilizes model-based control and inverted characteristics to fix this trouble. The version is a streamlined physics version of Figure, running online on the computer system inside the robotic, determining points like where to position a foot to stabilize the robotic, based upon dimensions from the onboard inertial dimension device and all of the setting sensing units.
We after that utilize inverted characteristics, which utilizes a design of the humanoid‘s web link masses, inertias, actuators, and so forth, to compute the torques we require at each joint to reach the activity we desire from the model-based controller (i.e., exactly how to obtain the foot to a specific location). This collection of estimations should occur accurately in actual time, hundreds or hundreds of times per secondly.
However accumulating this sort of version and making the calculation reliable can be rather difficult, considering that it needs us to mention all the information of physics that could be appropriate, from the feasible rubbing designs of the surface, to the feasible sorts of mistakes in our joint sensing units. It’s exceptionally effective, however it needs us to recognize a great deal concerning the globe.
Support knowing (RL) is an entirely various method of fixing the exact same trouble. Rather than making use of the robotic and globe designs onboard in real-time to compute the electric motor torques that we assume will certainly result in the physics we desire, we simulate globes to find out a control plan for the robotic in advance, on off-board computer systems that are a lot more effective than the on-board robotic computer systems.
We design the substitute robotic in as much information as feasible, in a substitute globe that has actually the anticipated challenges and bumps, and attempt countless feasible collections of electric motor torque commands, and observe every one of the feasible actions. We utilize expense features to evaluate whether a command attains an essentially beneficial feedback
Throughout substantial simulation time– however just hours in actual time– we find out a control plan that will certainly attain the objectives we desire, like stroll about without dropping, also if there’s an unanticipated hole in the ground. This indicates that we do not require to precisely recognize what will certainly occur in the real life; we simply require to have actually located a controller that functions well throughout a number of various globes that are comparable adequate to the actual one.
It compromises modeling initiative for computational initiative. And it indicates that we can find out controllers that check out the limitations of what could be literally feasible with the robotic, also if we do not recognize precisely what those borders are ourselves.
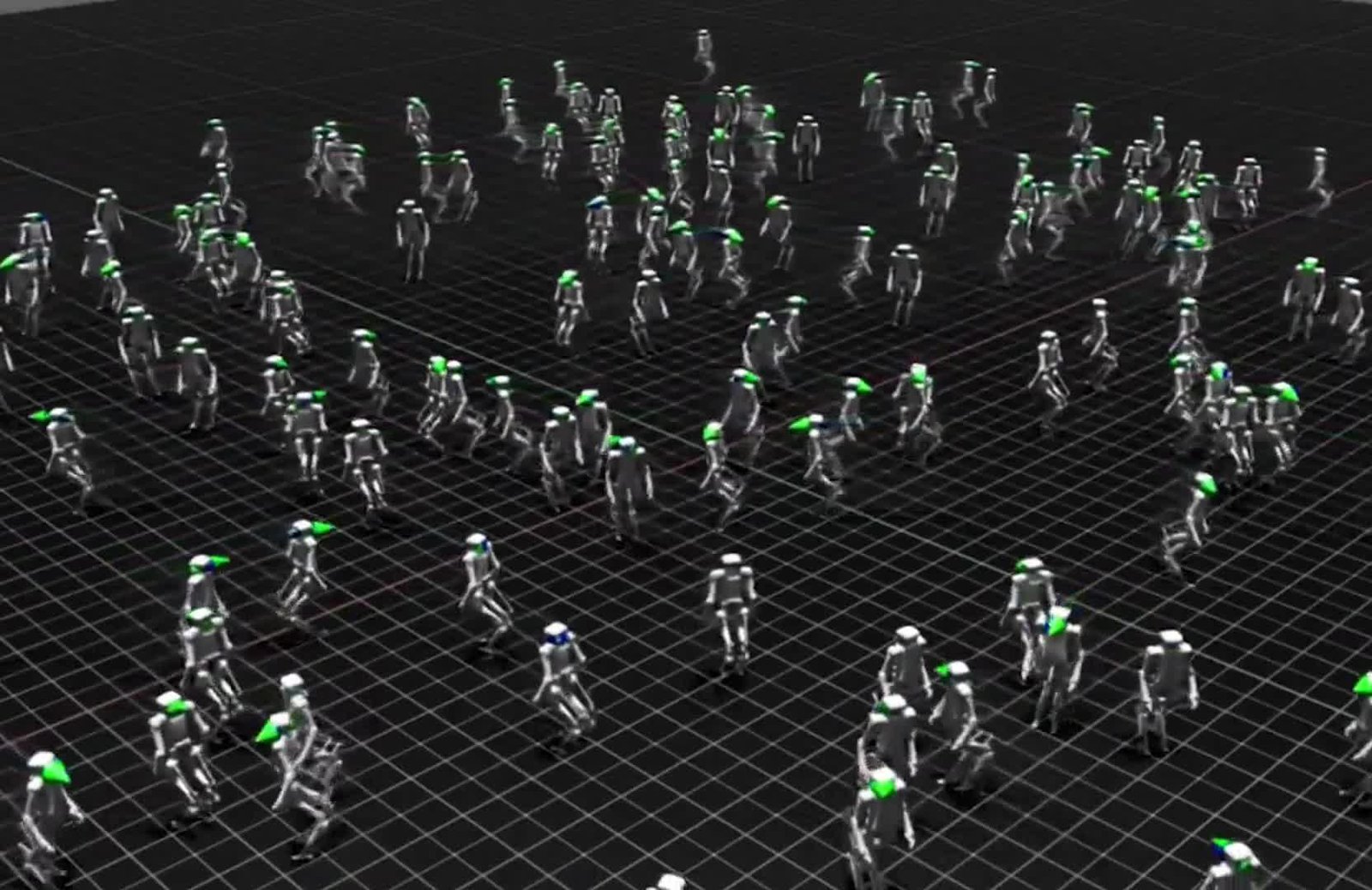
Educating Figure in simulation with NVIDIA’s devices developed for robotics.|Resource: NVIDIA
We have actually had the ability to show this in locations like step-recovery, where physics are especially tough to version. In scenarios where Figure sheds its ground, it’s frequently an outcome of an atmosphere where we do not have a great version of what’s taking place– there could be something pressing on or captured on Figure, or its feet could be sliding on the ground in an unanticipated method. Figure may not also have the ability to inform which problem it’s having.
However we can educate a controller to be durable to most of these disruptions with support knowing, training it on several feasible manner ins which the robotic may drop till it thinks of a controller that functions well in several scenarios. In the complying with graph, you can see exactly how huge of a distinction that training can make:
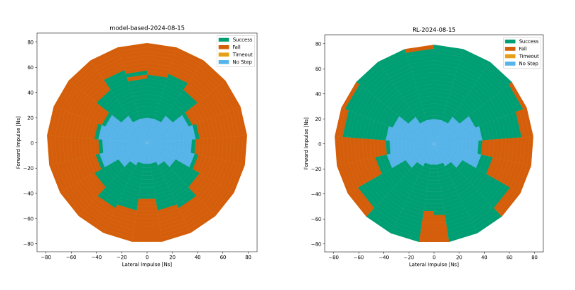

Contrasting efficiency of model-based controller (left) versus a controller educated with reinforcement-learning (right).|Resource: Dexterity Robotics
Early in 2014, we began making use of NVIDIA Isaac Laboratory to educate these sorts of designs. Collaborating with NVIDIA, we had the ability to make some standard plans that enabled Figure to walk. However, to be straightforward, they started with some strange habits.
Something that we did obtain right away, nevertheless, was the capacity to run a whole lot even more of our experiments. Relocating To Isaac Laboratory and a GPU-accelerated atmosphere was much faster than running simulations on the CPU. This allowed us to repeat a lot more promptly and begin to determine the essential location that we required to boost:
Identifying Dexterity Robotics’ Sim2Real spaces
In support knowing, maybe the greatest difficulty is determining exactly how to make a plan learnt a simulator transfer over to an actual robotic (therefore the term “Sim2Real”). There are a great deal of little distinctions in between the real life and a substitute one, and also if you replicate a great deal of globes with a great deal of variants, you could be missing out on some essential element that constantly occurs in the real life and never ever occurs similarly in your simulations.
In our situation, toe effects are one such location. With every footprint, Figure effects the ground with among its toe plates. And the outcome of that influence is tough to forecast.
Affecting the ground is currently an extremely disorderly physical trouble. (” Disorderly” in the official feeling, which is that really little discrepancies in the input can result in boundless variants in the result in time.)
Depending upon precisely just how your foot lands, you may slide, or have a great deal of grasp. You could be able to put in a great deal of pressure, or a little. Which little variant can result in a huge adjustment in the end result when you forecast where the remainder of your upper body will certainly wind up.
This is precisely what occurred with a few of our earlier Isaac Laboratory plans. In simulation, the robotic would certainly stroll with confidence and robustly. However in the real life, it would certainly slide and move around hugely.
When you come across a Sim2Real space such as this, there are 2 alternatives. The very easy choice is to present a brand-new incentive, informing the robotic not to do whatever negative point it is doing. However the trouble is that these benefits are a little bit like air duct tape on the robotic– inelegant, missing out on the origin. They accumulate, and they shadow the initial goal of the plan with several various other terms. It brings about a plan that may function, however is not reasonable, and acts unexpectedly when made up with brand-new benefits.
The various other, harder, choice is to take a go back and determine what it has to do with the simulations that vary from truth. Dexterity as a business has actually constantly been concentrated on recognizing the physical instinct behind what we do. It’s exactly how we developed our robotic, completely from the actuators to the software application.
Our RL method is no various. We wish to comprehend the why and utilize that to drive the exactly how So we started a six-month trip to determine why our substitute toes do not do the exact same point as our actual toes.
It ends up there are a great deal of factors. There were streamlining presumption in the crash geometry, errors in exactly how power circulated with our actuators and transmissions, and instabilities in exactly how restrictions are fixed in our distinct closed-chain kinematics (created by the linking poles affixed to our toe plates and tarsus). And we have actually been methodically researching, dealing with, and getting rid of these spaces.
The internet outcome has actually been a significant advance in our RL software application pile. Rather than a stack of stacked-reward features over whatever from “Quit shaking your foot” to “Stand straighter,” we have a handful of benefits around points like power usage and balance that are not just less complex, however additionally follow our standard instincts concerning exactly how Figure must relocate.
Spending the moment to comprehend why the simulation varied has actually educated us a great deal even more concerning why we desire Figure to relocate a specific method the top place. And most notably, combined with rapid NVIDIA Isaac Sim, a recommendation application improved NVIDIA Omniverse for imitating a screening AI-driven robotics, it’s allowed us to check out the influence of various physical qualities that we may desire in future generations of Figure.
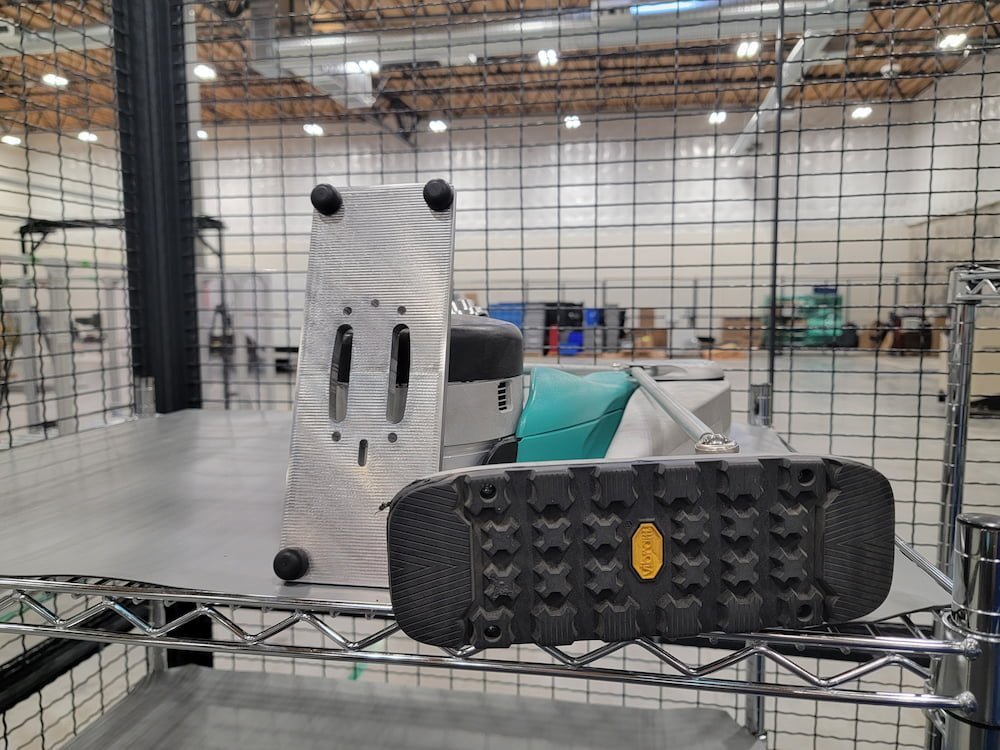
An instance of a modified toe/foot principle (left), making use of 4 get in touch with factors, rather than the typical shoe-style step (right).|Resource: Dexterity Robotics
We’ll be chatting even more concerning these subjects at the 2024 Seminar on Robotic Discovering (CoRL) following week in Munich, Germany. However the ethical of the tale is that recognizing the characteristics of the globe and our robotic, and recognizing the factors for resources of sound and unpredictability as opposed to dealing with the signs, have allow us utilize NVIDIA Isaac Laboratory to create simulations that are obtaining closer and closer to truth.
This allows substitute robotic habits to move straight to the robotic. And this aids us produce easy, user-friendly plans for regulating Figure that are a lot more smart, a lot more active, and a lot more durable in the real life.
Editor’s note: This short article was syndicated, with consent, from Dexterity Robotics’blog
 Concerning the writer
Concerning the writer

Pras Velagapudi is the primary modern technology policeman at Dexterity Robotics. His specializeds consist of commercial automation, robot control, multi-robot systems, mobile robotics, human-robot communication, dispersed preparation, and optimization. Before operating at Dexterity, Velagapudi was the vice head of state and principal designer of mobile robotics at Berkshire Grey.
The blog post How Agility Robotics crosses the Sim2Real gap with NVIDIA Isaac Lab showed up initially on The Robot Report.
发布者:Dr.Durant,转转请注明出处:https://robotalks.cn/how-agility-robotics-crosses-the-sim2real-gap-with-nvidia-isaac-lab/