


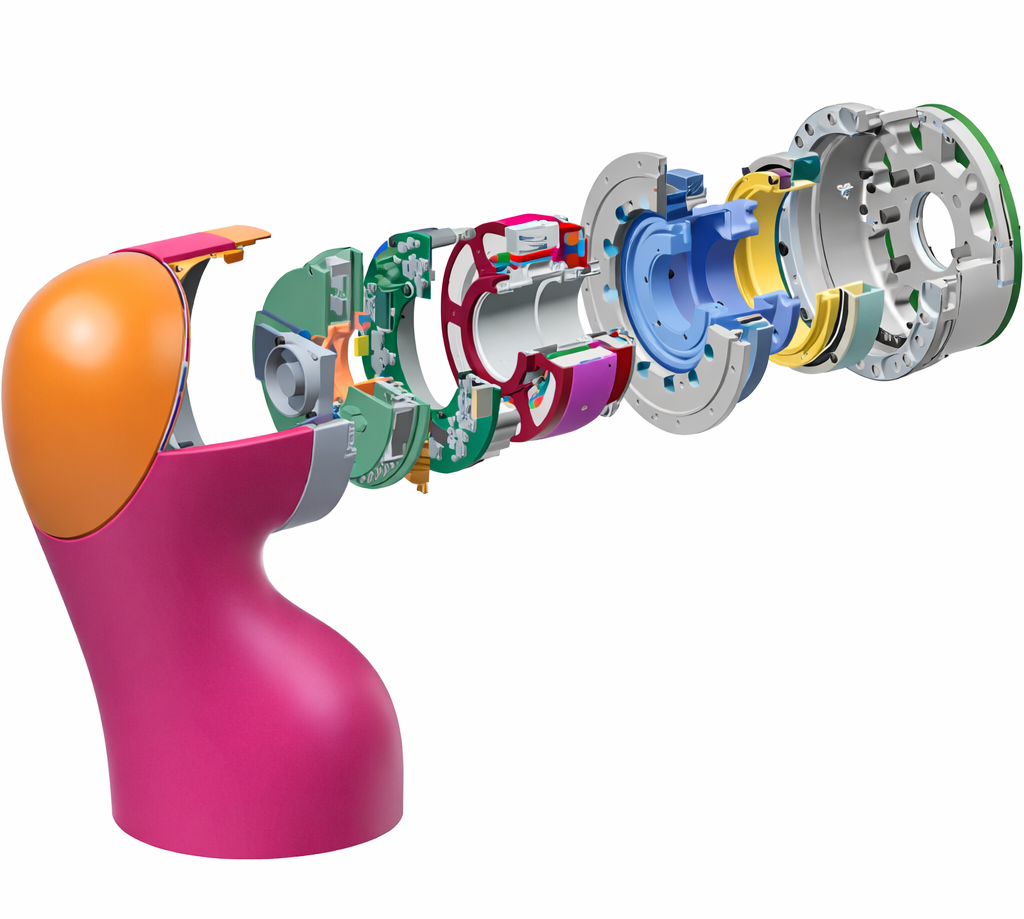
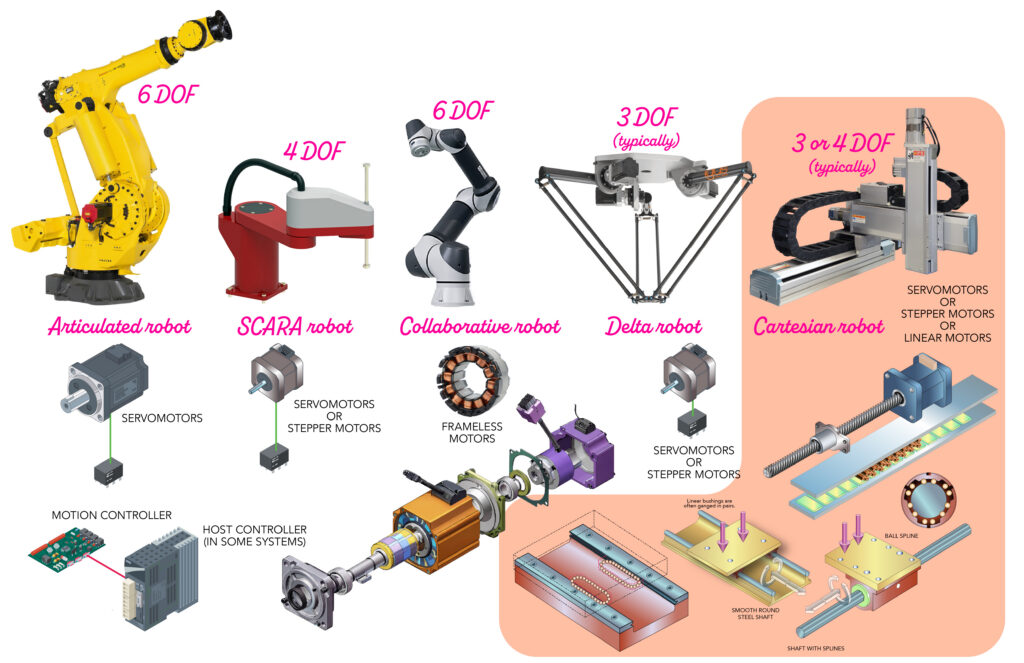
Various kinds of robotics, such as this cobot arm, rely upon various electric motors for accurate movement. Resource: Adobe Supply
Industrial six-axis robotics frequently incorporate frameless electric motors at their axes. Over the previous years, permanent-magnet brushless servomotors have actually pertained to control. Significantly usual in six-axis robot settings up are frameless and direct-drive variants.
A high electric motor post matter (with strain-wave tailoring) produces high torque result and reduced cogging. Frequently finishing such settings up are an outright encoder for closed-loop setting control and a security (generally shut) holding brake for risk-free power-off tons holding.
Various other torque electric motors are made use of with no tailoring for direct-drive procedure in assessment robotics and some medical or metrology arms requiring real zero-backlash procedure.
Making use of the “shoulder-elbow-wrist” example to recommendation levels of liberty, adjustments of field-oriented control together with tailored blades geometry and windings can customize robotic shoulder and elbow-joint habits to arm and haul masses. Existing to windings acting on a huge magnetic airgap convey rigidity and torque thickness.
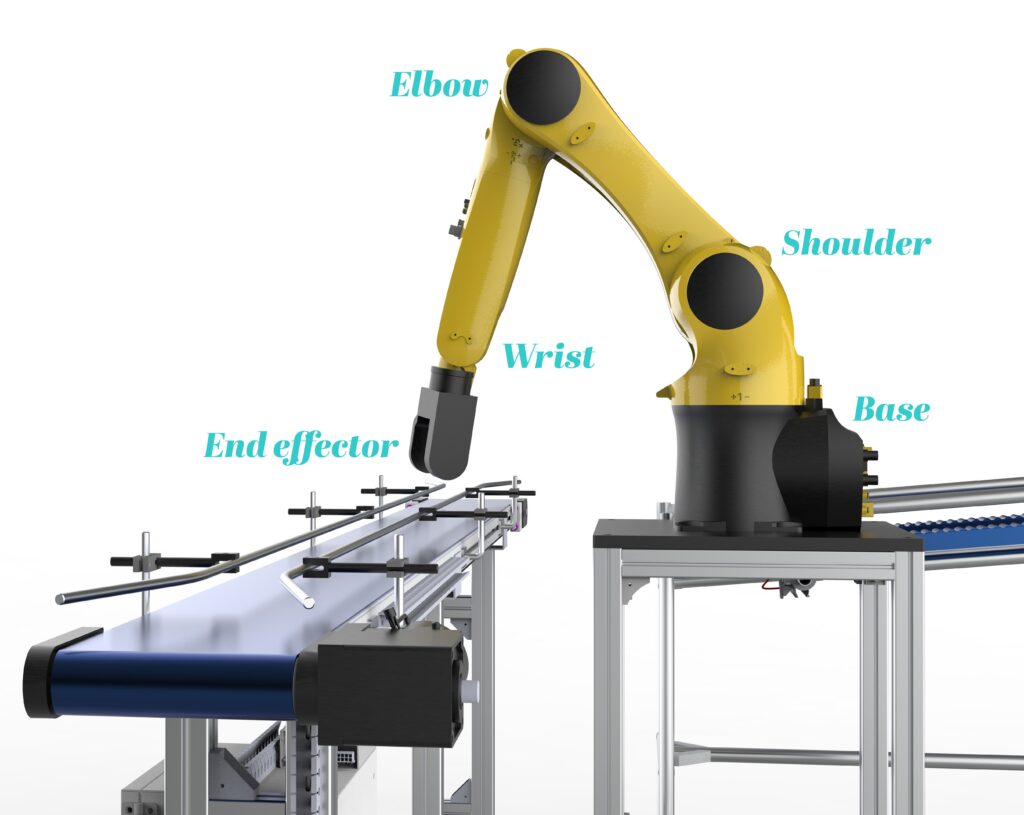
On the other hand, the electric motors for wrist roll, pitch, and yaw joints have to be light-weight with reduced inertia sans resonance. Also below though, permanent-magnet (PM) air conditioner servomotors still control– though they’re most likely to have frameless building or perhaps axial-flux or pancake-type building. Motors in these joints are additionally smaller sized due to the fact that overall lots are undoubtedly smaller sized at the robotic extremity. The high torque thickness of PM electric motors is vital.
Like expressing six-axis arms, numerous SCARA robotics for straight setting up and pick-and-place job additionally incorporate high-torque air conditioner servomotors on their planar rotating axes for fast velocities and rapid settling. Their upright Z axes can include servomotor-driven screw drives or perhaps direct electric motors.
Frameless electric motors end up being usual as robotics merge
Current years have actually brought merging of articulated commercial robotics and joint robotics as frameless electric motors have actually come to be extra usual in the joints of both. Both robotic kinds are additionally making raised use artificial intelligence and AI– specifically industry-specific AI and “physical AI” constructed for a solitary feature such as welding, fining sand, assessment, or setting up.

The merging of articulated commercial robotics and cobots is additionally seeing extra overlap in haul scores.
Haul mass and minute inertia certainly consists of that of the relocated robot links, end effect parts, and any type of real work surfaces being taken care of. With some robotics, if a momentary derating of rate, velocity, and accuracy serves, it could be feasible to periodically surpass ranked payload– as long as procedures continue to be less than any type of optimum haul specified.
- Associated: Installed movement and frameless electric motors in joint robotics
- Associated: 4 physical AI forecasts for 2026
Non-Cartesian robotics utilize a series of tailoring
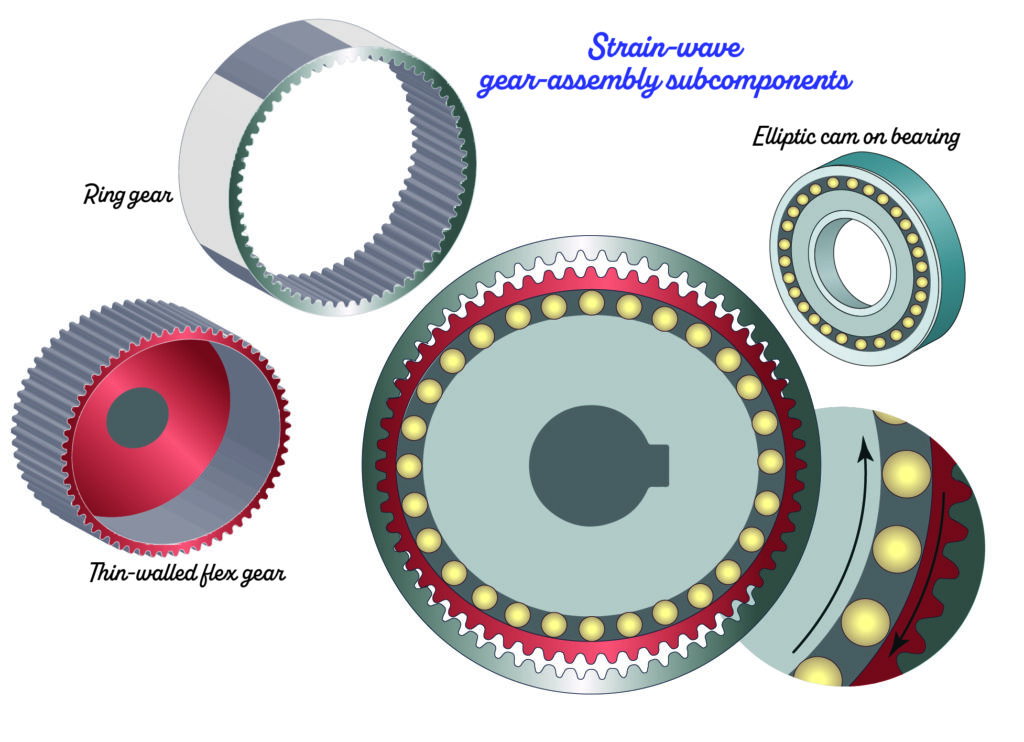
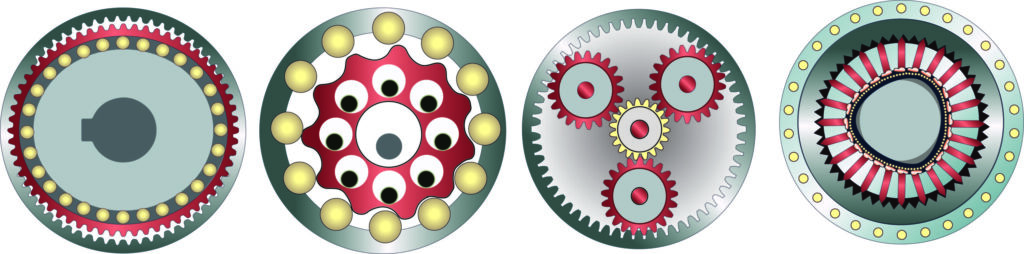
Robot joints frequently have cycloidal tailoring in addition to equipment collections relying upon wave-inducing subcomponents having an elliptical machine or Reuleaux (obvious “roo-low”) or various other polygonal form. Global and strain-wave tailoring control, though exclusive cycloidal systems discover usage in specialized robotics.
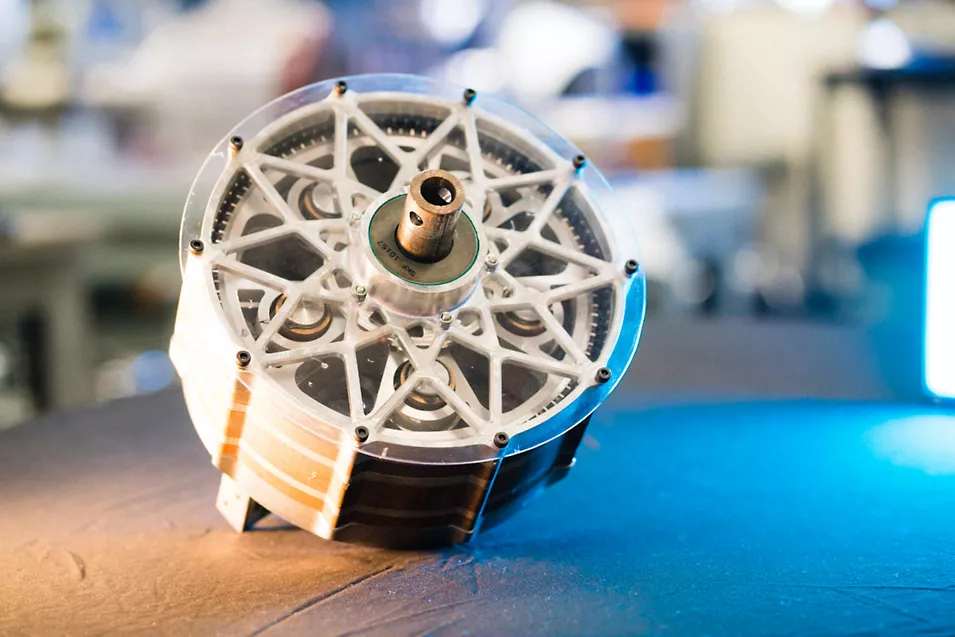
Situation in factor: New FluxWorks magnetic-gearing innovations utilize regulated electromagnetic fields to put in pressure without call. Keep tuned for extra on this modern technology quickly– specifically as it associates with robotics applications.
Yet an additional developed tailoring alternative for robotics currently seeing raised usage has 2 names:
- Cycloidal tailoring.
- Rotating vector or recreational vehicle tailoring as created by one producer.
In the beginning glimpse, cycloidals appear like trochoidal tailoring made use of in specific pumps … yet the innovations should not be perplexed.
Quick geometry lesson below … trochoidal and cycloidal tailoring consists of components that turn and map contours around an additional component. Cycloids mapped by a factor on a moving component’s area consist of:
- Epicycloids (for which the component rolls along the beyond a sunlight equipment or various other recommendation element).
- Hypocycloids for which the component rolls within a ring or various other recommendation element.
On the other hand, trochoids are mapped not by a factor on the rolling component’s area yet instead some factor within or without.
Technically, worldly collections are a type of epicyclic tailoring.
For worldly or strain-wave tailoring, depictive proportions are 50:1 to 200:1 … though can be reduced at six-axis robotics’ wrist joints. To name a few points, such tailoring increases velocity torque for power thickness– vital for six-axis robotics in addition to SCARA systems for which the setting up is essentially a cantilevered mass.
Suspension modifications seventh-axis equipment selection
Listed below we have tailoring instances from GAM Enterprises on each axis’ electric motor in 2 robotic arms. Gearing kinds vary for various arm plans. For instance, one of the most ideal tailoring in the pinion (and carriage) driving gearmotor of an expressed robotic seventh-axis system partly relies on the robotic’s alignment precede.
The 7th axis of floor-mount systems frequently have a right-angle hypoid transmission. Many frequently “gantry” describes Cartesian plans … though put on hold six-axis robotics additionally certify. These put on hold gantries frequently have a helical inline transmission. Simply to be clear, both assistance power rack-and-pinion collections having helical tooth geometries.
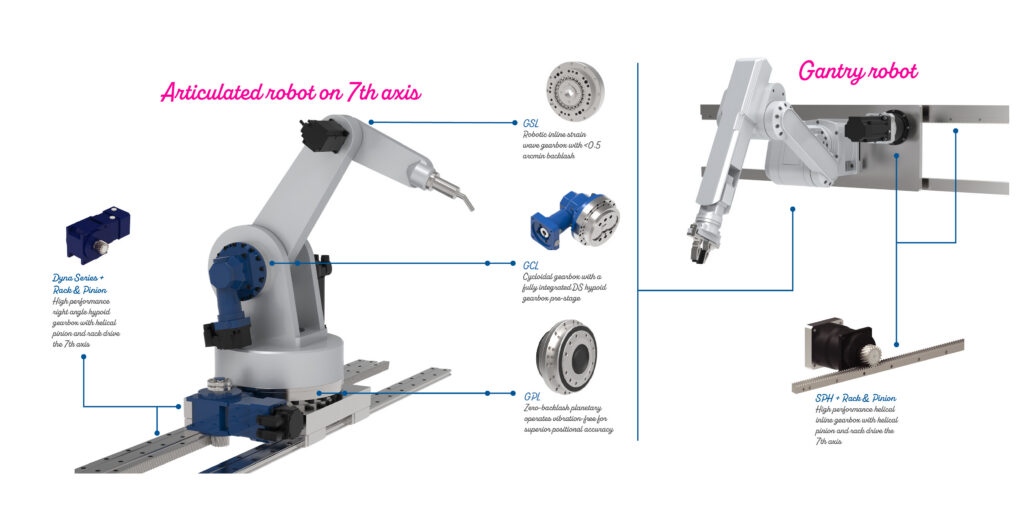
The right-angle transmission for the floor-mounted track does a couple of points: It prevents the robotic’s envelope, a lengthy drive in the traveling instructions, and unpleasant installing.
Rather, a right-angle setup maintains the electric motor reduced and put along with the carriage for a rigid and clean setting up. Hypoid tailoring excels on rack-pinion drives as a result of their high torque and durability on turning around axes similar to this based on shock lots from regular procedure and emergency situation quits.
Technologies integrated in small robotics
To show exactly how various other parts integrated, allow’s take into consideration Chieftek Accuracy (cpc) S0 mini robot arms. These relocate hauls to 0.5 kg with boundless ability to move from several joints.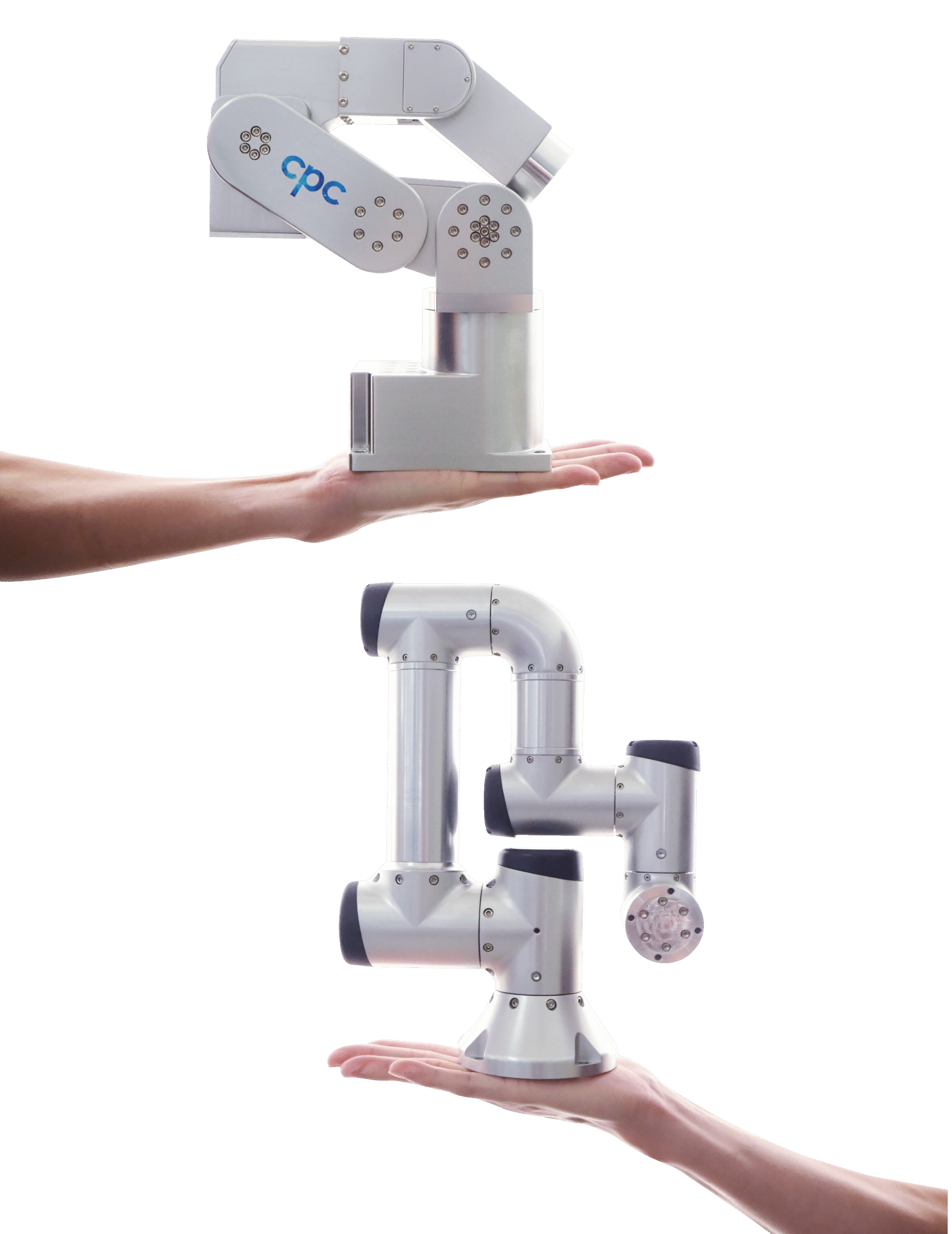
A DB0 variation (leading right) uses a little much less ability to move for greater rigidity and ± 5.0- µm repeatability. Both robot arms incorporate greater than 200 different components primarily made and made by Chieftek:
- Personalized large-bore frameless electric motors (approving 48-V input) present movement at each joint.
- Strain-wave tailoring with high proportions make best use of torque.
- Dual-feedback systems at each axis with an outright optical encoder and an outright magnetic encoder sandwiching the tailoring to make sure repeatability.
Electric motor drives with cool-running vehicle driver electronic devices and power phases finish the small styles.
- Associated: Why are worldly transmissions liked for servo applications?
- Associated: Inertia matching: Why best isn’t constantly finest
Currently allow’s end up interest to the one sort of robotic we have not described yet– X-Y-Z Cartesian robotics. The cuboid reach of Cartesian gantries or truly any type of variant are very easy to imagine. These systems are most ideal where completion effect can perform its jobs in a provided alignment within an airplane. Actually, Cartesians are a favored option for specifically huge workcells … and for such circumstances, frequently extra inexpensive than a fleet of also extremely small SCARA robotics. For smaller sized workcells, Cartesian robotics can confirm an extra costly option.
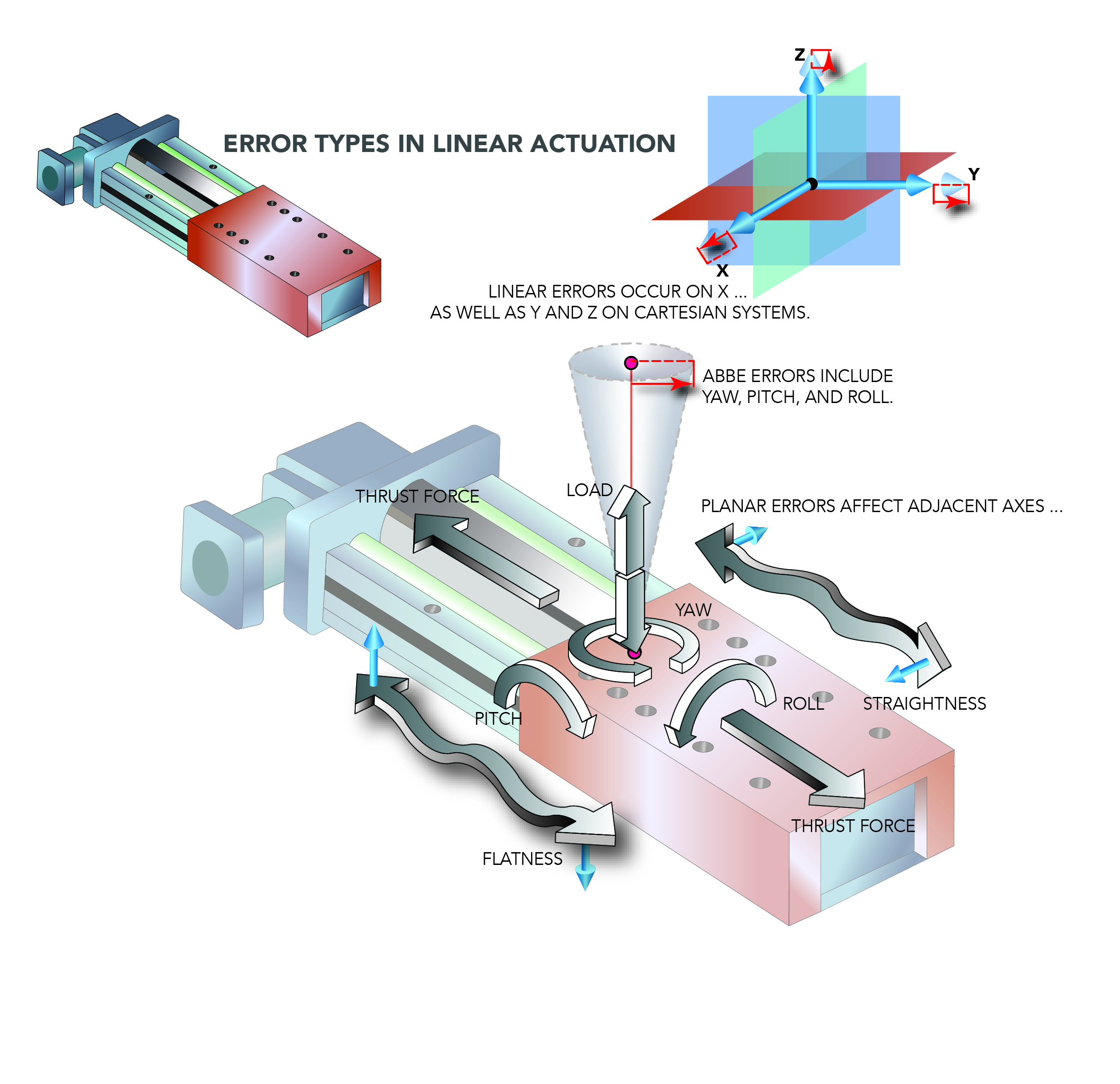
Cartesian-robot axes are never ever flawlessly vertical. So, end-effector repeatability regarding each of axis relies on that of each drive in addition to the quantity of movement combining in between the axes … with mistake raising as each axis obtains further from its home setting.
An additional factor to consider: Contrasted to that of verbalized robotic kinds, the assimilation and transmitting of end-effector supply lines (in the kinds of wires, tube, providers, and solution loopholes) is additionally extra entailed.
That claimed, a Cartesian robotic tailored to a massive manufacturing can please precise needs like nothing else alternative. These type of circumstances warrant fairly high in advance expenses with lasting performances, result quantities, and scaling of procedures.
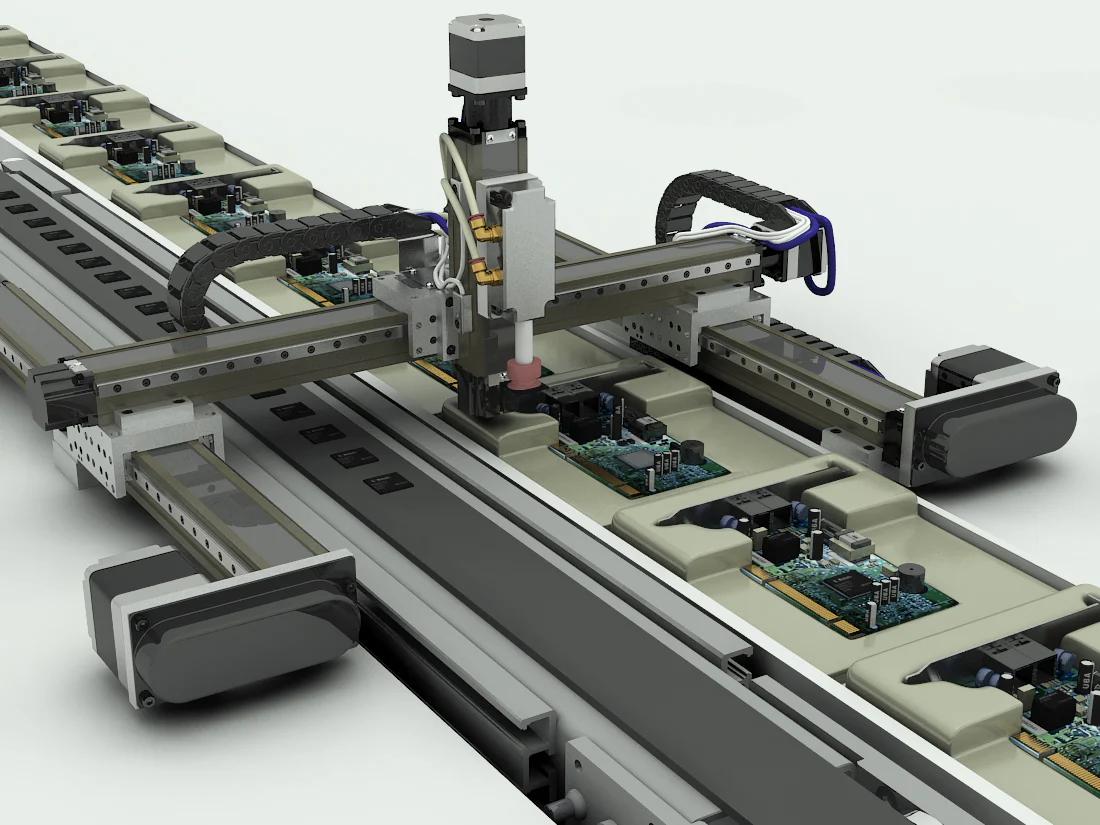
Listed below we see 2 extremely various Cartesian robotics. In both however, modular equipment together with specific controllers and interactions decrease style intricacy.
PBC Linear overviews and belt or leadscrew-driven servo or stepper-motorized axes incorporate to develop personalized robotics for component handling, vision-based placement, and various other integrated movement in product packaging, setting up, and assessment. The instance below is a plan with stepper electric motors and screws to automate circuit-board setting up.
Similarly, Chieftek Accuracy direct overviews and direct electric motors total vision phases, press components, and research laboratory workcells requiring great positioning or component transportation with exceptionally high strength and repeatability.

Editor’s note: This short article is syndicated from The Robotic Record brother or sister website Layout Globe.
The message Just how electric motor style makes it possible for various kinds of robotics showed up initially on The Robotic Record.
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/how-motor-design-enables-different-types-of-robots/