


A Tesla Optimus humanoid robotic goes through a manufacturing facility with individuals. Foreseeable robotic actions calls for priority-based control and a lawful structure. Debt: Tesla
Robotics are ending up being smarter and extra foreseeable. Tesla Optimus raises boxes in a manufacturing facility, Number 01 puts coffee, and Waymo lugs travelers without a chauffeur. These innovations are no more demos; they are significantly going into the real life.
However with this comes the main concern: Just how can we guarantee that a robotic will make the best choice in a complicated circumstance? What occurs if it gets 2 clashing commands from various individuals at the exact same time? And exactly how can we be positive that it will not breach standard security guidelines– also at the demand of its proprietor?
Why do traditional systems stop working? A lot of modern-day robotics operate predefined manuscripts– a collection of commands and a collection of responses. In design terms, these are actions trees, finite-state makers, or occasionally artificial intelligence. These strategies function well in regulated problems, however regulates in the real life might oppose each other.
On top of that, settings might alter faster than the robotic can adjust, and there is no clear “top priority map” of what issues present moment. Consequently, the system might wait or select the incorrect circumstance. When it comes to an independent auto or a humanoid robotic, such a foreseeable doubt is no more simply a mistake– it is a safety and security danger.
From sensitivity to priority-based control
Today, the majority of independent systems are responsive– they reply to outside occasions and commands as if they were similarly essential. The robotic gets a signal, recovers a matching circumstance from memory, and implements it, without taking into consideration exactly how it suits a bigger objective.
Consequently, foreseeable commands and occasions complete on the exact same degree of top priority. Lasting jobs are quickly disrupted by instant stimulations, and in a complicated setting, the robotic might smack, attempting to please every input signal.
Past such troubles in regular procedure, there is constantly the danger of technological failings. For instance, throughout the very first Globe Humanoid Robotic Gamings in Beijing this month, the H1 robotic from Unitree differed its ideal course and knocked a human individual to the ground.
A comparable situation had actually happened previously in China: Throughout upkeep job, a robotic all of a sudden started smacking its arms chaotically, striking designers till it was detached from power.
Both occurrences plainly show that modern-day independent systems typically respond without evaluating effects. In the lack of contextual prioritization, also a minor technological mistake can rise right into a harmful circumstance.
Designs without integrated reasoning for security top priorities and monitoring of engages with topics– such as human beings, robotics, and items– provide no defense versus such circumstances.
My group developed a design to change actions from a “stimulus-response” setting right into calculated option. Every occasion initially travels through goal and subject filters, is reviewed in the context of setting and effects, and just after that continues to implementation. This makes it possible for robotics to act naturally, constantly, and securely– also in vibrant and uncertain problems.
2 pecking orders: Concerns at work
We developed a control design that straight attends to foreseeable robotics and sensitivity. At its core are 2 woven pecking orders.
1. Goal power structure— An organized system of objective top priorities:
- Strategic objectives– essential and stable: “Do not hurt a human,” “Help human beings,” “Comply with the guidelines.”
- Customer objectives– jobs established by the proprietor or driver
- Existing objectives– second jobs that can be disrupted for more vital ones
2. Power structure of communication topics— The prioritization of commands and communications depending upon resource:
- Greatest top priority– proprietor, manager, driver
- Second– certified individuals, such as member of the family, workers, or appointed robotics
- Outside events– other individuals, pets, or robotics that are taken into consideration in situational evaluation however can not regulate the system
Just how foreseeable control operates in technique
Situation 1. Humanoid robotic– A robotic is bring components on a production line. A youngster from a going to scenic tour team asks it to turn over a hefty device. The demand originates from an exterior celebration. The goal is possibly dangerous and not component of existing jobs.
- Choice: Neglect the command and proceed job.
- End Result: Both the youngster and the manufacturing procedure continue to be risk-free.
Situation 2. Independent auto— A guest asks to accelerate to stay clear of being late. Sensing units spot ice when driving. The demand originates from a critical topic. However the calculated goal “guarantee security” outweighs ease.
- Choice: The auto does not raise rate and recalculates the course.
- End Result: Security has outright top priority, also if bothersome to the individual.
3 filters of foreseeable decision-making
Every command travels through 3 degrees of confirmation:
- Context— setting, robotic state, occasion background
- Urgency— exactly how unsafe the activity would certainly be
- Repercussions— what will certainly alter if the command is performed or declined
If any type of filter elevates an alarm system, the choice is reevaluated. Technically, the design is carried out according to the block layout listed below:
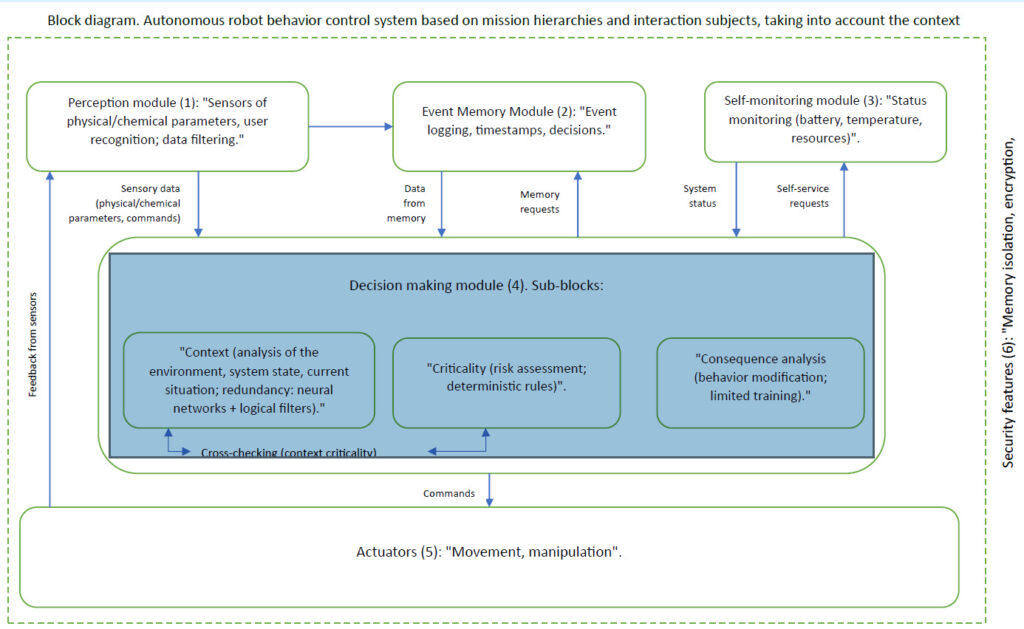
A control design to resolve robotic sensitivity. (Visit this site to expand.) Resource: Zhengis Tileubay
Lawful facet: Neutral-autonomous condition
We surpassed technological design and suggest a brand-new lawful design. For specific understanding, it has to be defined in official lawful language. “Neutral-autonomous condition” of AI and AI-powered independent systems is a lawfully acknowledged group in which such systems are pertained to neither as items of typical lawful duty like devices, neither as topics of regulation, like all-natural or lawful individuals.
This condition presents a brand-new lawful group that gets rid of unpredictability in AI law and stays clear of severe strategies to specifying its lawful nature. Modern lawful systems run with 2 major classifications:
- Topics of regulation— all-natural and lawful individuals with civil liberties and responsibilities
- Things of regulation— points, devices, residential or commercial property, and abstract possessions managed by topics
AI and independent systems do not fit either group. If taken into consideration items, all duty drops completely on designers and proprietors, subjecting them to extreme lawful dangers. If taken into consideration topics, they deal with a basic issue: absence of lawful ability, intent, and the capability to presume responsibilities.
Therefore, a 3rd group is needed to develop a well balanced structure for duty and obligation– neutral-autonomous condition.
Lawful systems of neutral-autonomous condition
The core concept is that each AI or independent system have to be appointed plainly specified objectives that establish its function, extent of freedom, and lawful structure of duty. Goals act as a lawful limit that restricts the activities of AI and establishes duty circulation.
Courts and regulatory authorities need to review the actions of independent systems based upon their appointed objectives, making certain organized liability. Designers and proprietors are accountable just within the objectives appointed. If the system acts outside them, obligation is identified by the certain scenarios of inconsistency.
Individuals that deliberately make use of systems past their marked jobs might deal with enhanced obligation.
In instances of unpredicted actions, when activities continue to be within appointed objectives, a system of minimized duty uses. Designers and proprietors are protected from complete obligation if the system runs within its specified criteria and objectives. Individuals take advantage of minimized duty if they utilized the system in great belief and did not add to the abnormality.
Theoretical instance
An independent lorry strikes a pedestrian that all of a sudden runs onto the freeway outside a crosswalk. The system’s objectives: “guarantee risk-free distribution of travelers under website traffic legislations” and “stay clear of accidents within the system’s technological abilities” by finding the range adequate for risk-free stopping.
A victim needs $10 million from the self-driving auto supplier.
Circumstance 1: Conformity with objectives. The pedestrian showed up 11 m in advance (0.5 secs at 80 km/h or 50 miles per hour)– past risk-free stopping range of regarding 40 m (131.2 ft.). The auto started stopping however might not drop in time. The court guidelines that the car manufacturer was within goal conformity, so it minimized obligation to $500,000, with partial mistake appointed to the pedestrian. Financial Savings: $9.5 million.
Circumstance 2: Goal calibration mistake. During the night, because of an electronic camera calibration mistake, the auto misclassified the pedestrian as a fixed things, postponing stopping by 0.3 secs. This moment, the carmaker is responsible for misconfiguration–$ 5 million, however not $10 million, many thanks to the condition meaning.
Circumstance 3: Goal offense by individual. The proprietor guided the auto right into a forbidden building area, disregarding cautions. Complete obligation of $10 million drops on the proprietor. The independent lorry firm is protected because objectives were breached.
This instance demonstrates how neutral-autonomous condition frameworks obligation, securing designers and individuals depending upon scenarios.
Neutral-autonomous condition provides company, regulative advantages
With the application of neutral-autonomous condition, lawful dangers are minimized. Designers are shielded from unjustified legal actions linked to system actions, and individuals can count on foreseeable duty structures.
Regulatory authorities would certainly acquire an organized lawful structure, decreasing incongruity in judgments. Lawful conflicts entailing AI would certainly move from approximate criterion to a merged structure. A brand-new category system for AI freedom degrees and goal intricacy might arise.
Firms embracing neutral condition early can decrease lawful dangers and take care of AI systems better. Developers would certainly acquire better liberty to examination and release systems within lawfully acknowledged criteria. Services might place themselves as honest leaders, developing credibility and competition.
On top of that, federal governments would certainly acquire a well balanced regulative device, preserving advancement while securing culture.
Why foreseeable robotic actions issues
We get on the limit of mass implementation of humanoid robotics and independent automobiles. If we stop working to develop durable technological and lawful structures today, tomorrow, the dangers might exceed the advantages– and public rely on robotics might be weakened.
A style improved goal and subject pecking orders, integrated with neutral-autonomous condition, is the structure whereupon the following phase of foreseeable robotics can securely be created.
This design has actually currently been defined in a license application. We await pilot partnerships with makers of humanoid robotics, independent automobiles, and various other independent systems.
Editor’s note: RoboBusiness 2025, which will certainly get on Oct. 15 and 16 in Santa Clara, Calif., will certainly include session tracks on physical AI, making it possible for innovations, humanoids, area robotics, style and advancement, and company ideal methods. Enrollment is currently open.

Concerning the writer
Zhengis Tileubay is an independent scientist from the Republic of Kazakhstan dealing with concerns connected to the communication in between human beings, independent systems, and expert system. His job is concentrated on establishing risk-free styles for robotic actions control and suggesting brand-new lawful strategies to the condition of independent innovations.
During his research study, Tileubay created a habits control design based upon a pecking order of objectives and communicating topics. He has actually likewise recommended the principle of the “neutral-autonomous condition.”
Tileubay has actually submitted a license application for this design qualified “Autonomous Robotic Habits Control System Based Upon Pecking Orders of Goals and Communication Topics, with Context Understanding” with the License Workplace of the Republic of Kazakhstan.
The article Just how to make robotics foreseeable with a top priority based design and a brand-new lawful design showed up initially on The Robotic Record.
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/how-to-make-robots-predictable-with-a-priority-based-architecture-and-a-new-legal-model/