


Scientists at NVIDIA are functioning to make it possible for scalable artificial generation for robotic version training. Resource: NVIDIA
A significant difficulty in robotics is educating robotics to do brand-new jobs without the huge initiative of accumulating and classifying datasets for each brand-new job and setting. Current study initiatives from NVIDIA objective to fix this difficulty with using generative AI, globe structure designs like NVIDIA Universe, and information generation plans such as NVIDIA Isaac GR00T-Mimic and GR00T-Dreams.
NVIDIA just recently covered just how study is making it possible for scalable artificial information generation and robotic version training process utilizing globe structure designs, such as:
- DreamGen: The study structure of the NVIDIA Isaac GR00T-Dreams plan.
- GR00T N1: An open structure version that allows robotics to discover generalist abilities throughout varied jobs and personifications from actual, human, and artificial information.
- Unrealized activity pretraining from video clips: A without supervision technique that discovers robot-relevant activities from massive video clips without needing hands-on activity tags.
- Sim-and-real co-training: A training method that integrates substitute and real-world robotic information to construct even more durable and versatile robotic plans.
Globe structure designs for robotics
Universe globe structure designs (WFMs) are educated on countless hours of real-world information to anticipate future globe states and produce video clip series from a solitary input picture, making it possible for robotics and self-governing lorries to prepare for future occasions. This anticipating ability is essential for artificial information generation pipes, helping with the fast development of varied, high-fidelity training information.
This WFM method can substantially speed up robotic understanding, boost version effectiveness, and minimize advancement time from months of hands-on initiative to simply hours, according to NVIDIA.
DreamGen
DreamGen is an artificial information generation pipe that deals with the high expense and labor of accumulating massive human teleoperation information for robotic understanding. It is the basis for NVIDIA Isaac GR00T-Dreams, a plan for creating huge artificial robotic trajectory information utilizing globe structure designs.
Standard robotic structure designs call for comprehensive guidebook demos for each brand-new job and setting, which isn’t scalable. Simulation-based options usually deal with the sim-to-real void and call for hefty hands-on design.
DreamGen gets over these difficulties by utilizing WFMs to develop practical, varied training information with very little human input. This method allows scalable robotic understanding and solid generalization throughout actions, settings, and robotic personifications.
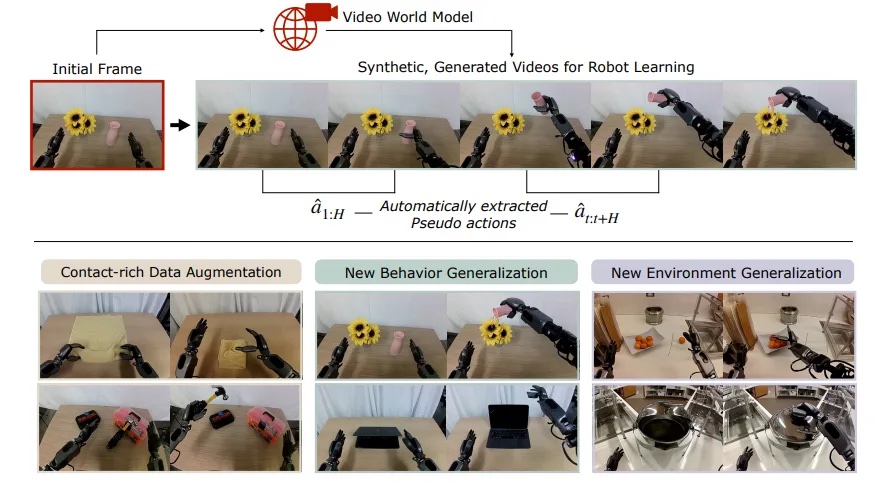
Generalization with the DreamGen artificial information pipe.|Resource: NVIDIA
The DreamGen pipe contains 4 crucial actions:
- Post-train globe structure version: Adjust a globe structure version like Cosmos-Predict2 to the target robotic utilizing a tiny collection of actual demos. Cosmos-Predict2 can produce premium photos from message (text-to-image) and aesthetic simulations from photos or video clips (video-to-world).
- Produce artificial video clips: Make use of the post-trained version to develop varied, photorealistic robotic video clips for brand-new jobs and settings from picture and language triggers.
- Essence pseudo-actions: Use an unexposed activity version or inverted characteristics version (IDM) to transform these video clips right into classified activity series (neural trajectories).
- Train robotic plans: Make use of the resulting artificial trajectories to educate visuomotor plans, making it possible for robotics to do brand-new actions and generalise to hidden circumstances.
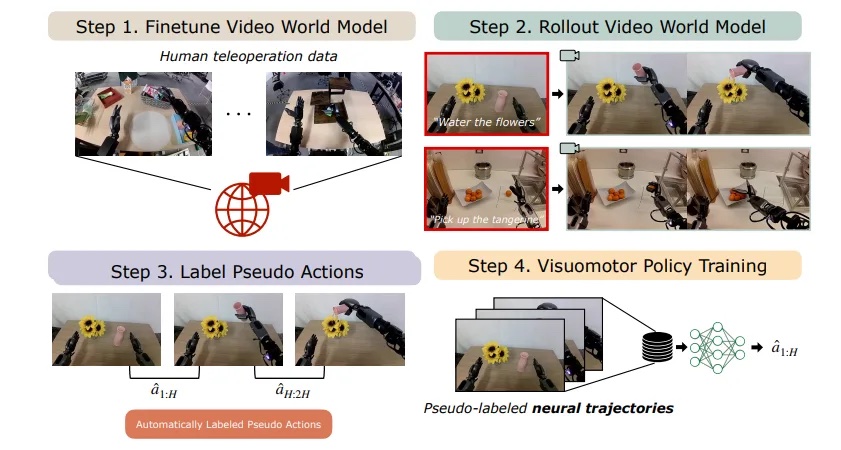
Summary of the DreamGen pipe.|Resource: NVIDIA
DreamGen Bench
DreamGen Bench is a specialized standard made to assess just how efficiently video clip generative designs adjust to certain robotic personifications while internalizing rigid-body physics and generalising to brand-new things, actions, and settings. It examines 4 top globe structure designs– NVIDIA Universe, WAN 2.1, Hunyuan, and CogVideoX– determining 2 essential metrics:
- Guideline following: DreamGen Bench examines whether created video clips precisely show job directions– such as “grab the onion”– examined utilizing vision-language designs (VLMs) like Qwen-VL-2.5 and human annotators.
- Physics following: It measures physical realistic look utilizing devices such as VideoCon-Physics and Qwen-VL-2.5 to guarantee that video clips follow real-world physics.
As seen in the chart listed below, designs racking up greater on DreamGen Bench– indicating they produce even more practical and instruction-following artificial information– continually result in far better efficiency when robotics are educated and examined on actual adjustment jobs. This favorable partnership reveals that purchasing more powerful WFMs not just enhances the high quality of artificial training information however likewise equates straight right into even more qualified and versatile robotics in technique.
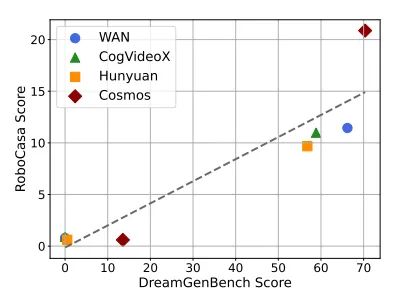
Favorable efficiency relationship in between DreamGen Bench and RoboCasa.|Resource: NVIDIA
NVIDIA Isaac GR00T-Dreams
Isaac GR00T-Dreams, based upon DreamGen study, is an operations for creating huge datasets of artificial trajectory information for robotic activities. These datasets are utilized to educate physical robotics while conserving considerable time and guidebook initiative compared to accumulating real-world activity information, insisted NVIDIA.
GR00T-Dreams utilizes the Universe Predict2 WFM and Universe Factor to produce information for various jobs and settings. Universe Factor designs consist of a multimodal LLM (huge language version) that creates literally based reactions to customer triggers.

Structure designs and process for training robotics
Vision-language-action (VLA) designs can be post-trained utilizing information created from WFMs to make it possible for unique actions and procedures in hidden settings, discussed NVIDIA.
NVIDIA Study utilized the GR00T-Dreams plan to produce artificial training information to establish GR00T N1.5, an upgrade of GR00T N1 in simply 36 hours. This procedure would certainly have taken almost 3 months utilizing hands-on human information collection.
GR00T N1, an open structure version for generalist humanoid robotics, notes a significant advancement worldwide of robotics and AI, the firm stated. Improved a dual-system style influenced by human cognition, GR00T N1 merges vision, language, and activity, making it possible for robotics to comprehend directions, regard their settings, and carry out facility, multi-step jobs.
GR00T N1 improves strategies like LAPA (unrealized activity pretraining for basic activity designs) to pick up from unlabeled human video clips and methods like sim-and-real co-training, which mixes artificial and real-world information for more powerful generalization. We’ll learn more about LAPA and sim-and-real co-training later on.
By integrating these technologies, GR00T N1 does not simply adhere to directions and carry out jobs– it establishes a brand-new standard wherefore generalist humanoid robotics can accomplish in facility, ever-changing settings, NVIDIA stated.
GR00T N1.5 is an updated open structure version for generalist humanoid robotics, improving the initial GR00T N1, which includes a polished VLM educated on a varied mix of actual, substitute, and DreamGen-generated artificial information.
With enhancements in style and information high quality, GR00T N1.5 provides greater success prices, far better language understanding, and more powerful generalization to brand-new things and jobs, making it a much more durable and versatile remedy for innovative robot adjustment.
Unrealized Activity Pretraining from Video Clips
LAPA is a without supervision technique for pre-training VLA designs that gets rid of the demand for costly, by hand classified robotic activity information. Instead of counting on huge, annotated datasets– which are both expensive and lengthy to collect– LAPA utilizes over 181,000 unlabeled Net video clips to discover reliable depictions.
This technique provides a 6.22% efficiency increase over innovative designs on real-world jobs and accomplishes greater than 30x better pretraining performance, making scalable and durable robotic discovering even more easily accessible and reliable, stated NVIDIA.
The LAPA pipe runs with a three-stage procedure:
- Unrealized activity quantization: A Vector Quantized Variational AutoEncoder (VQ-VAE) version discovers distinct “unrealized activities” by examining changes in between video clip frameworks, developing a vocabulary of atomic actions such as understanding or putting. Unrealized activities are low-dimensional, found out depictions that sum up intricate robotic actions or movements, making it simpler to regulate or mimic high-dimensional activities.
- Unrealized pretraining: A VLM is pre-trained utilizing actions cloning to anticipate these unrealized activities from the initial stage based upon video clip monitorings and language directions. Habits cloning is a technique where a version discovers to duplicate or mimic activities by mapping monitorings to activities, utilizing instances from presentation information.
- Robotic post-training: The pretrained version is after that post-trained to adjust to actual robotics utilizing a tiny labeled dataset, mapping unrealized activities to physical commands.
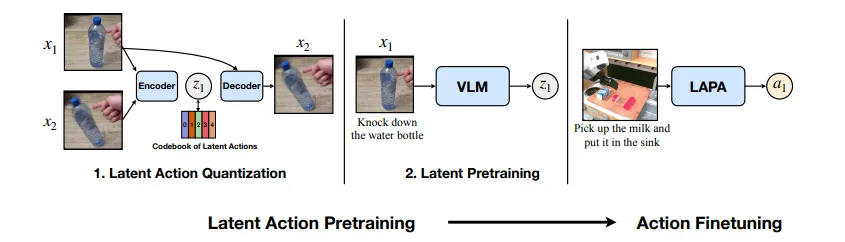
Summary of unrealized activity pretraining.|Resource: NVIDIA
Sim-and-real co-training operations
Robot plan training deals with 2 essential difficulties: the high expense of accumulating real-world information and the “fact void,” where plans educated just in simulation usually fall short to do well in actual physical settings.
The sim-and-real co-training operations addresses these problems by integrating a tiny collection of real-world robotic demos with huge quantities of simulation information. This method allows the training of durable plans while efficiently decreasing expenses and linking the fact void.
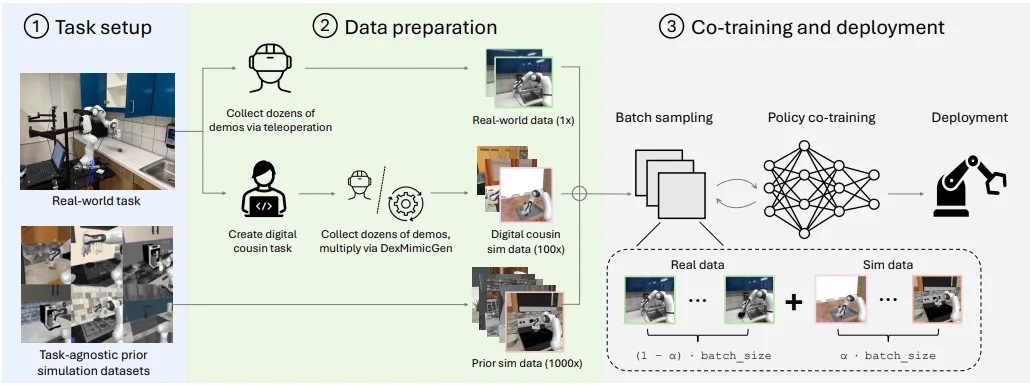
Summary of the various phases of acquiring information.|Resource: NVIDIA
The crucial action in the operations are:
- Job and scene configuration: Arrangement of a real-world job and the choice of task-agnostic previous simulation datasets.
- Information prep work: In this information prep work phase, real-world demos are accumulated from physical robotics, while extra substitute demos are created, both as task-aware “electronic relatives,” which very closely match the actual jobs, and as varied, task-agnostic previous simulations.
- Co-training specification adjusting: These various information resources are after that mixed at an enhanced co-training proportion, with a focus on straightening cam perspectives and taking full advantage of simulation variety as opposed to photorealism. The last includes set tasting and plan co-training utilizing both actual and substitute information, causing a durable plan that is released on the robotic.
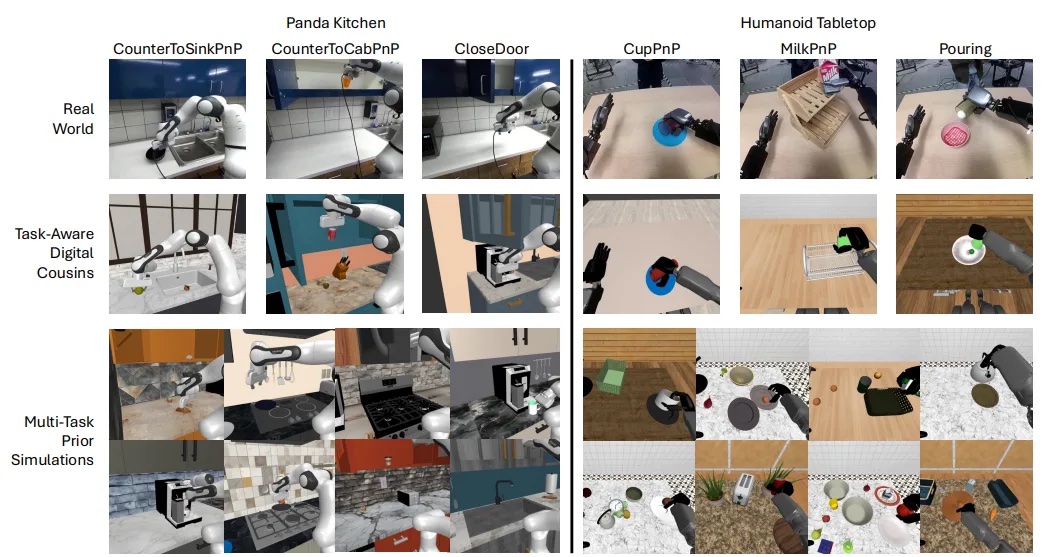
Visual of simulation and real-world jobs.|Resource: NVIDIA
As displayed in the picture listed below, raising the variety of real-world demos can enhance the success price for both real-only and co-trained plans. Despite having 400 actual demos, the co-trained plan continually outmatched the real-only plan by approximately 38%, showing that sim-and-real co-training continues to be helpful also in data-rich setups.
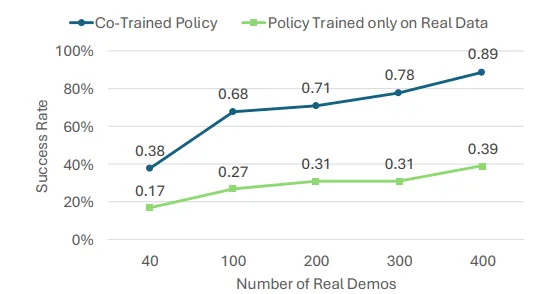
Chart revealing the efficiency of the co-trained plan and plan educated on actual information just.|Resource: NVIDIA
Robotics ecological community starts taking on brand-new designs
Leading companies are taking on these process from NVIDIA study to speed up advancement. Early adopters of GR00T N designs consist of:
- AeiRobot: Making use of the designs to allow its commercial robotics to comprehend all-natural language for intricate pick-and-place jobs.
- Foxlink: Leveraging the designs to enhance the versatility and performance of its commercial robotic arms.
- Lightwheel: Verifying artificial information for the much faster implementation of humanoid robotics in manufacturing facilities utilizing the designs.
- NEURA Robotics: Assessing the designs to speed up the advancement of its home automation systems.
 Concerning the writer
Concerning the writer
Oluwaseun Doherty is a technological advertising designer trainee at NVIDIA, where he services robotic understanding applications on the NVIDIA Isaac Sim, Isaac Laboratory, and Isaac GR00T systems. Doherty is presently going after a bachelor’s level in computer technology at Southeastern Louisiana College, where he concentrates on information scientific research, AI, and robotics.
Editor’s note: This short article was syndicated from NVIDIA’s technological blog site.
The message Just how to educate generalist robotics with NVIDIA’s study process and structure designs showed up initially on The Robotic Record.
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/how-to-train-generalist-robots-with-nvidias-research-workflows-and-foundation-models/