

Movement control is allowing brand-new degrees of robot accuracy. Resource: Adobe Supply
Gathering much focus nowadays are commercial robotics and their assimilation of movement elements and unification right into workcells with various other motion-based computerized devices. Such robot workcells likewise include conveyors, vision systems, and makers to automate particular jobs.
So, what makes an activity system a robotic or device? To put it simply, what’s the difference in between movement systems made use of in automated equipment which taking the type of robotics? The last can instantly performing complicated and programmable (and specifically reconfigurable) activity series.
This meaning is undoubtedly fairly obscure, and also the ISO 8373 meaning can define makers not normally thought about robotics. It claims a robotic is an “instantly managed multi-purpose manipulator” reprogrammable in 3 or even more axes.

This igus arrangement includes AI-powered device vision.
On the other hand with robotics, makers such as vending makers (to offer simply one instance) are made for a solitary distinct usage in a solitary taken care of place. They can run jobs on various work surfaces however aren’t most likely to be reprogrammed for numerous objectives. Equipments just offer the solitary distinct use giving acquired items.
Robotics in the type of Cartesian robotics likewise include settings up of linear-motion elements such as direct overviews, ballscrews, and encoders– or pre-integrated actuators, or perhaps direct electric motors as in the high-speed setting up revealed listed below. Yet much like verbalized and SCARA robotics, these are more probable to offer different flexible features.
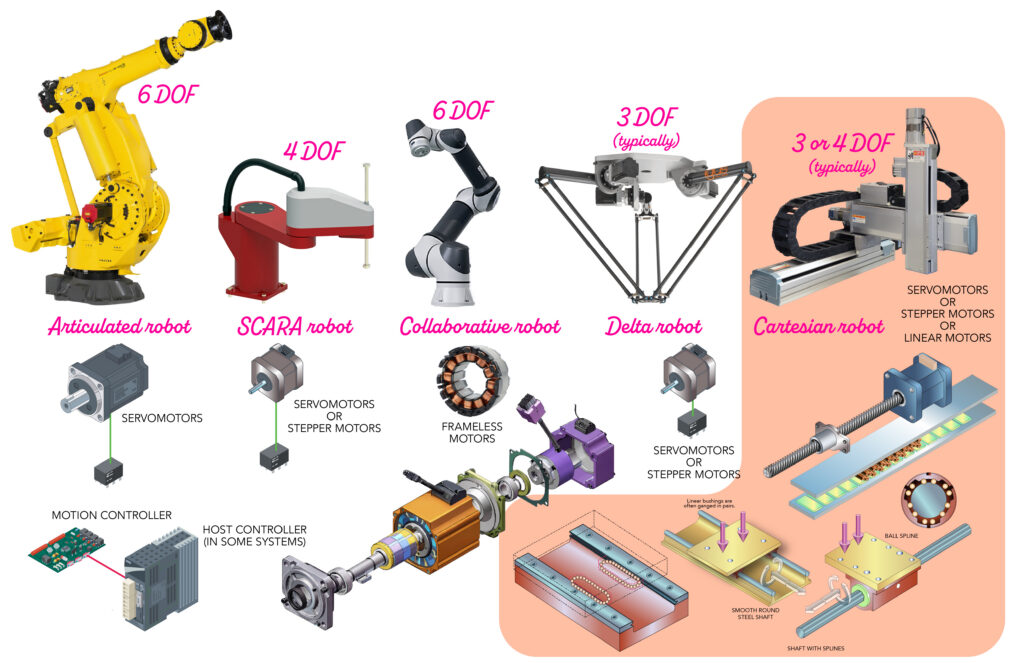
Common innovations for each and every robotic kind
Actually, some equipments, electric motors, and regulates innovations prevail to verbalized and SCARA robotics along with Cartesian systems. These fixed systems– usually what’s suggested of “commercial robotics”– also share standard innovations with computerized assisted automobiles (AGVs).
Even more info on AGVs can be located at The Robotic Record, Automated Storage Facility, and Style Globe Yet techniques vary for integrating multi-axis movement with robotic kinematics.
Associated: Leading motion-control and actuation choices for robotics
The trick is lowering latency, intricacy, and price for product handling, device often tending, and various other arrangements including robotics along with various other kinds of movement systems.
Movement part distributors = robot distributors
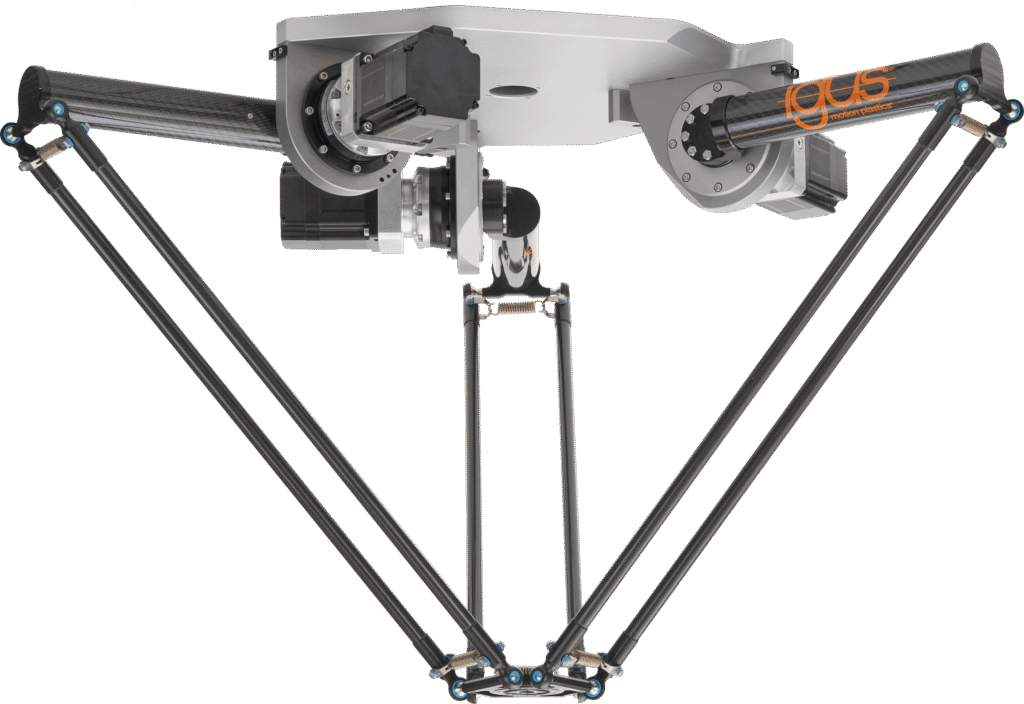
An RBTX three-DoF delta robotic. Resource: igus
As robotics are simply a part of movement system layouts, it’s no surprise that numerous motion-component distributors supply totally pre-integrated robotics of their very own. Others sustain the layout and assimilation of robotics with subsystems tailored to robot procedures.
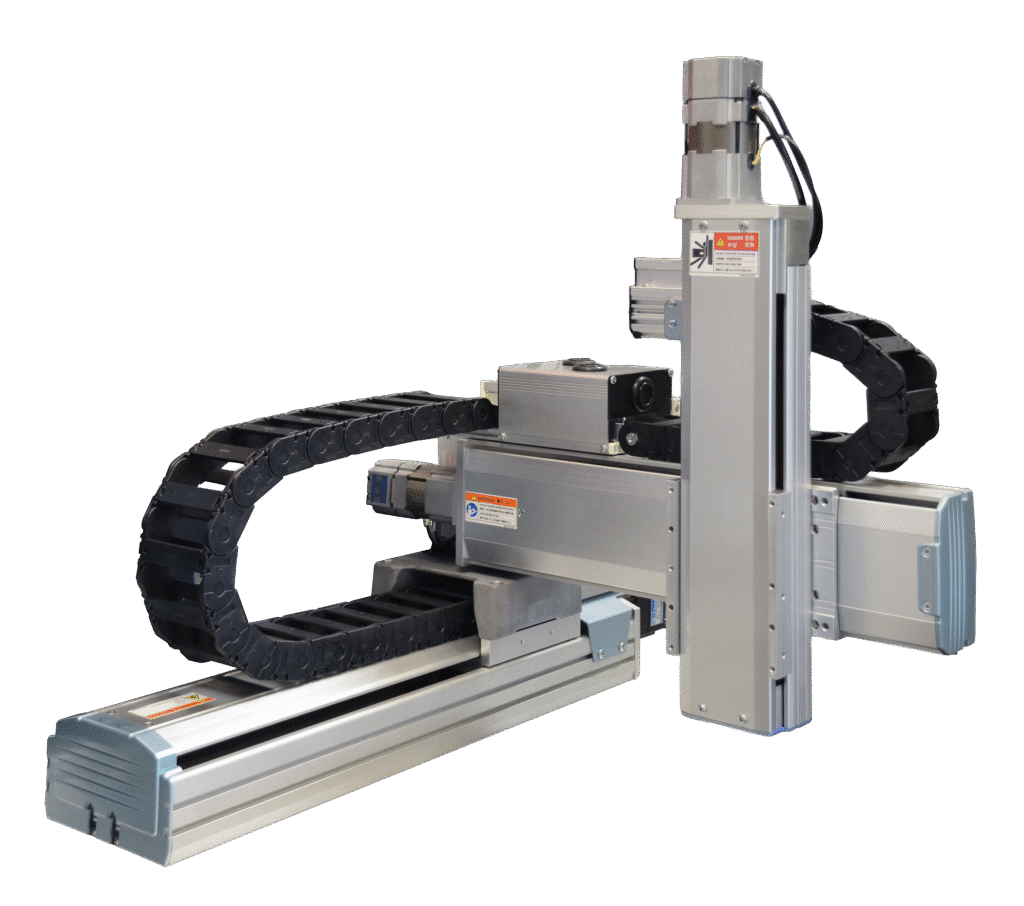
This Cartesian robotic consists of actuators and direct slides from PHD. Such phases are fairly modular and especially typical in product packaging. Resource: PHD Inc.
Actually, some distributors supply mechanized axes and movement remedies for each robot kind made use of in commercial applications. Approved, low-priced variants might focus on use crafted plastic elements (likewise provided independently) so they’re not useful for all applications.
That stated, a lot of these remedies operate in research study, food and drink, vending, customer solution, lab automation, and various other cost-sensitive automation.

A light commercial robotic arm with an examination tube. Resource: Adobe Supply
Stepper electric motors (and specifically closed-loop steppers) are likewise ideal for Cartesian and SCARA-style robotics made use of in light setting up and lab automation– consisting of published motherboard (PCB) loaders and test-fixture robotics.
Closed-loop stepper electric motors (fitted with encoders) more frequently convey movement to joints of settings up relocating hauls to 3 kg (6.6 pound.) or two– or to grippers, device changers, vision devices, or feed devices on soldering iron.
On this friendly SCARA setting up, there are stepper electric motors, belt drives, and a screw-driven upright axis with simple direct overviews.
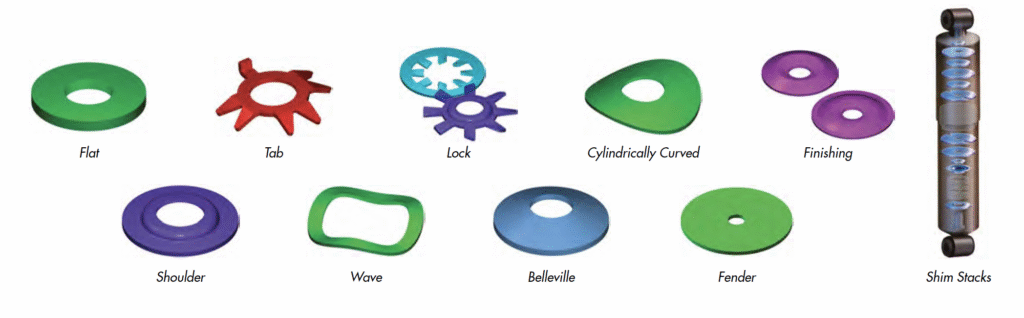
Boker’s assistances robotics with custom-made washing machines, spacers, and shims for birthing preload, rail positioning, transmission spacing, end-effector installing offsets, and sensing unit standoffs. These elements supply limited resistances and repeatable product residential properties. Resource: Boker’s
To the tiniest elements– consisting of washing machines, spacers, shims, and bolts. For instance, these components hold the setting up while avoiding stack-up mistake that can create binding, angular imbalance, or tool-center drift.
Delta robotics have distinct kinematics and characteristics
Delta or crawler robotics are their very own type with kinematics including NEMA stepper-based screw actuators … or belt drives on each affiliation. Or else, numerous industrial-grade deltas (when it comes to pick-and-place jobs) include permanent-magnet servo gearmotors (with inline helical or global tailoring) for each and every parallel affiliation.
In the stainless delta robotic revealed listed below, affiliations straight affix to servomotor result shafts. Equipment proportions are reduced since the setting up itself presents high characteristics.
For tailoring in delta robotics, helical tailoring minimizes resonance, however global tailoring is specifically power-dense.
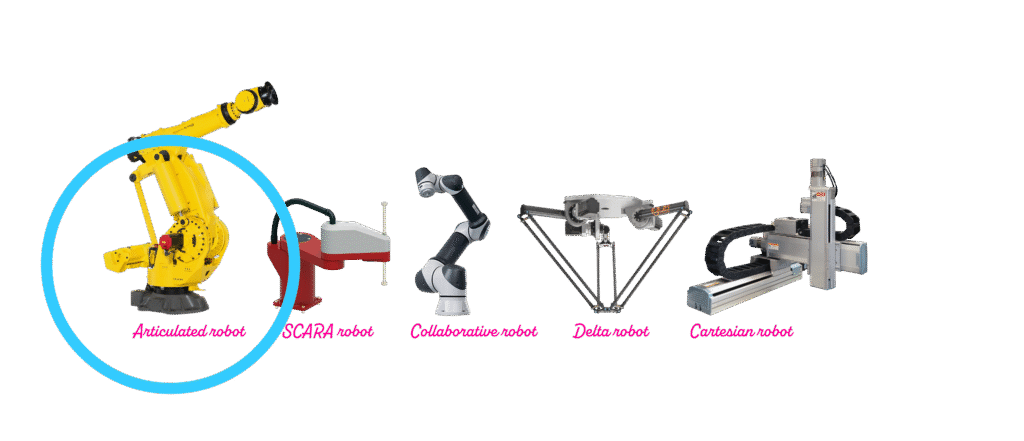
Common robot arms have 6 levels of liberty
Expressed 6 degree-of-freedom (DoF) robot arms are what most laymen photo when asked to raise aa commercial robot arm. These have affiliations in collection with job envelope constricted by the joints. They are specified by the end effect’s optimum X-Y-Z get to together with θX, θY, θZ varieties.
It prevails to make use of shoulder-elbow-wrist examples to reference levels of liberty. A corrected elbow joint places the wrist at its outermost from the base– and completion effect in a placement of minimized efficiency. A curved elbow joint brings the end-effector closer to its base for even more positioning variety.
Articulated robotics stand out at navigating work surfaces with nonaligned terminals and surface areas.
For 6-D0F robotics (along with SCARAs that we’ll cover following) every joint has a collection small repeatability. Nevertheless, general repeatability at the end effect depends upon its placement precede with outermost gets to having the most awful worths. So, workcell format is best when things are well within the arm’s reach and not needing any kind of joints to think a completely aligned pose.
Movement in SCARA systems
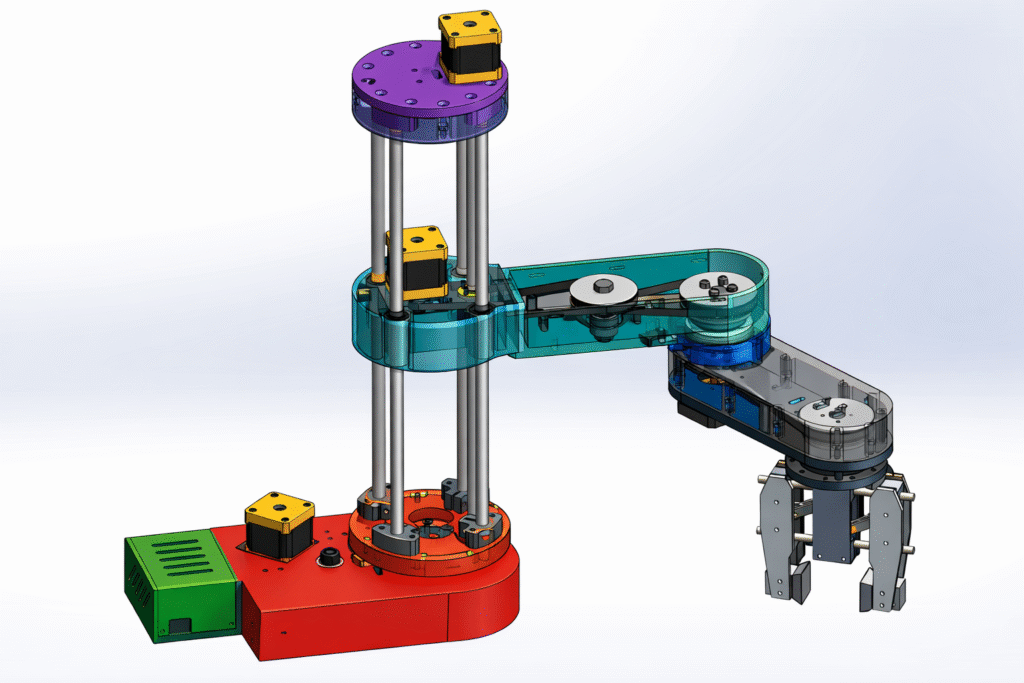
SCARA robotics have 3 or four-axis kinematics and control equipment for cupboard or DIN-rail installment. They master pick-and-place lab applications. Resource: igus
Careful conformity setting up robotic arms (SCARA) are one more kind of articulated system with affiliations in collection. These lead for pick-and-place jobs relocating work surfaces from one conveyor or one more level surface area to one more– specifically if the workcell permits the SCARA to be centrally placed. They can small to modest throughput and where installment will not validate great deals of modification– insertion or press-fit features, for instance.

All-in-one SCARAs complete versus Cartesians and offer mid-range applications.
SCARAs can be acquired as off-the-shelf, 3 or four-DoF remedies … or the kinematics offer themselves to internal builds.
An additional advantage: SCARAs, like various other verbalized robotics, usually have hassle-free passthroughs for feeding power, encoder signals, I/O electrical wiring, and pneumatically-driven lines from the base throughout effect.

Industrial SCARA joints normally consist of air conditioner servomotors with outright encoders for placement responses also when primary power is reduced and recovered. Encoders without batteries can assist make the SCARA compact. A lot more density (and get to envelope) is feasible with a well-integrated joint pile– and an electric motor, bearing, and equipment provider having actually lessened axial size.
Worldly gearheads convey torsional rigidity and effectiveness with density to fit within joints. There’s no flexible windup like that connected specific strain-wave equipments. So, the controller can keep high repeatability without hostile settlement formulas.
Additionally typical are security brakes at the extremity joints (J3 and J4). The Z axis (as in a normal Epson robotic) makes use of a round screw with round spline. The igus instance listed below is a bit various: It has a belt-driven Z axis including 2 direct overviews.

This robotic has a belt-driven Z axis including 2 direct overviews. Resource: igus
Editor’s note: This short article is syndicated from The Robotic Record brother or sister website Style Globe.
The article Integrated movement control allows innovative robotic movement showed up initially on The Robotic Record.
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/integrated-motion-control-enables-sophisticated-robot-motion/