


In this meeting collection, we’re fulfilling a few of the AAAI/SIGAI Doctoral Consortium individuals to learn even more concerning their research study. In this most recent meeting, Haimin Hu informs us concerning his research study on the mathematical structures of human-centered freedom and his prepare for future jobs, and offers some guidance for PhD pupils wanting to take the following action in their occupation.
Could you provide us a review of the research study you performed throughout your PhD?
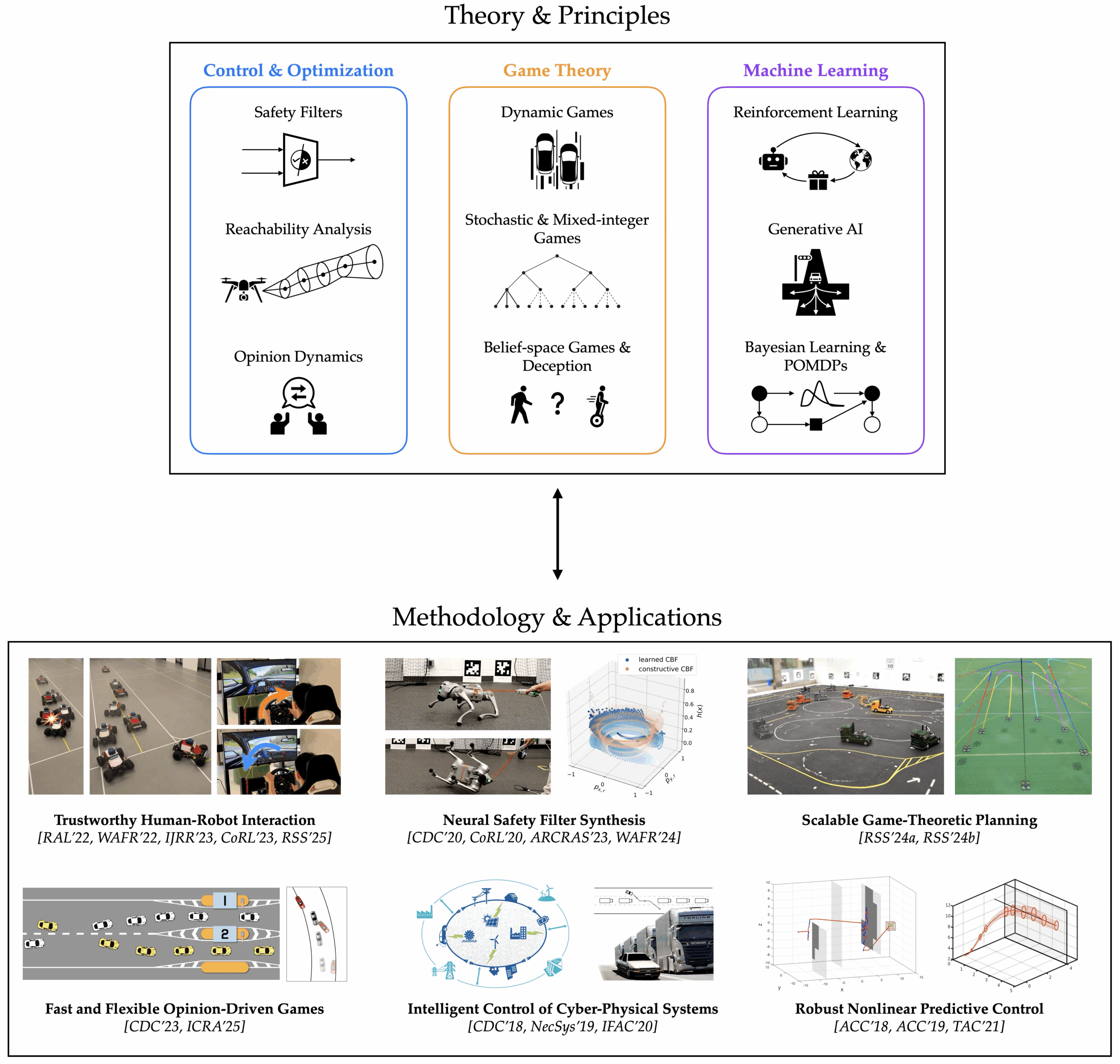
My PhD research study, performed under the guidance of Teacher Jaime Fernández Fisac in the Princeton Safe Robotics Lab, concentrates on the mathematical structures of human-centered freedom. By incorporating vibrant video game concept with artificial intelligence and safety-critical control, my job intends to make certain self-governing systems, from self-driving cars to drones and quadrupedal robotics, are performant, proven, and trustworthy when released in human-populated area. The core concept of my PhD research study is to intend robotics’ movement in the joint area of both physical and info states, proactively making sure security as they browse unpredictable, altering atmospheres and engage with human beings. Its crucial payment is a linked mathematical structure– backed by video game concept– that permits robotics to securely engage with their human peers, adjust to human choices and objectives, and also assist human beings fine-tune their abilities. Particularly, my PhD job adds to the complying with locations in human-centered freedom and multi-agent systems:
- Credible human– robotic communication: Preparation secure and effective robotic trajectories by shutting the calculation loophole in between physical human-robot communication and runtime understanding that lowers the robotic’s unpredictability concerning the human.
- Proven neural security evaluation for complicated robot systems: Knowing durable neural controllers for robotics with high-dimensional characteristics; assuring their training-time merging and deployment-time security.
- Scalable interactive preparation under unpredictability: Manufacturing game-theoretic control plans for complicated and unpredictable human– robotic systems at range.
Existed a task (or facet of your research study) that was specifically fascinating?
Security in human-robot communication is particularly tough to specify, due to the fact that it rests on an, I would certainly claim, nearly undeniable inquiry: Just how secure is secure sufficient when human beings might act in approximate methods? To provide a concrete instance: Is it adequate if a self-governing car can stay clear of striking a dropped biker 99.9% of the moment? Suppose this price can just be accomplished by the car constantly quiting and waiting on the human to vacate the method?
I would certainly say that, for reliable implementation of robotics in human-populated area, we require to match basic analytical techniques with well-defined durable security guarantees under a vetted collection of procedure problems too developed as those of bridges, nuclear power plant, and lifts. We require runtime finding out to lessen the robotic’s efficiency loss brought on by safety-enforcing maneuvers; this asks for formulas that can minimize the robotic’s intrinsic unpredictability generated by its human peers, as an example, their intent (does a human motorist intend to combine, reduce behind, or remain in the lane?) or feedback (if the robotic comes more detailed, exactly how will the human respond?). We require to close the loophole in between the robotic’s understanding and decision-making to ensure that it can maximize effectiveness by expecting exactly how its recurring communication with the human might impact the progressing unpredictability, and inevitably, its long-lasting efficiency.
What made you intend to research AI, and the location of human-centered robot systems particularly?
I have actually been attracted by robotics and smart systems considering that childhood years, when I would certainly invest whole days viewing sci-fi anime like Mobile Fit Gundam, Neon Genesis Evangelion, or Future GPX Cyber Solution What mesmerized me had not been simply the advanced innovation, yet the vision of AI as a real companion– enhancing human capacities instead of changing them. Cyber Solution particularly grown the concept of human-AI co-evolution in my mind: an AI co-pilot that not just assists a human motorist browse high-speed, high-stakes atmospheres, yet additionally adjusts to the motorist’s design with time, inevitably making the human a far better racer and growing common trust fund along the road. Today, throughout my cooperation with Toyota Study Institute (TRI), I work with human-centered robotics systems that personify this concept: creating AI systems that team up with individuals in vibrant, safety-critical setups by quickly lining up with human intent with multimodal inputs, from physical help to aesthetic hints and language comments, giving birth to the extremely concepts that when resided in my childhood years creative imagination.
You have actually landed a professors setting at Johns Hopkins College (JHU)– congratulations! Could you chat a little bit concerning the procedure of work browsing, and maybe share some guidance and understandings for PhD pupils that might go to a comparable phase in their occupation?
The work search was absolutely extreme yet additionally deeply satisfying. My guidance to PhD pupils: begin believing very early concerning the sort of long-lasting effect you intend to make, and act at an early stage your application bundle and work talk. Likewise, make certain you speak with individuals, particularly your elderly coworkers and peers on duty market. I directly profited a great deal from the list below sources:
- The Professor Is In
- Faculty Application Advice by Teacher Sylvia Herbert
- Tips for Computer Science Faculty Applications by Teacher Yisong Yue
- Research Statement by Teacher Tom Silver
- Autonomy Talks (instances of wonderful talks in wide locations of freedom and AI)
Do you have a concept of the research study jobs you’ll be servicing at JHU?
I desire to assist produce a future where human beings can certainly welcome the visibility of robotics around them. In the direction of this vision, my laboratory at JHU will check out the complying with subjects:
- Uncertainty-aware interactive movement preparation: Just how can robotics intend secure and effective movement by making up their progressing unpredictability, in addition to their capability to minimize it with future communication, picking up, interaction, and understanding?
- Human– AI co-evolution and co-adaptation: Just how can personified AI systems gain from human colleagues while assisting them fine-tune existing abilities and get brand-new ones in a secure, tailored way?
- Safe human-compatible freedom: Just how can self-governing systems make certain recommended security while continuing to be lined up with human worths and in harmony with human cognitive restrictions?
- Scalable and generalizable tactical decision-making: Just how can multi-robot systems ensure, worked with choices in vibrant, human-populated atmospheres?

Just how was the experience participating in the AAAI Doctoral Consortium?
I had the benefit of participating in the 2025 AAAI Doctoral Consortium, and it was an unbelievably useful experience. I’m particularly thankful to the coordinators for curating such a thoughtful and encouraging setting for early-career scientists. The emphasize for me was the mentoring session with Dr Ming Yin (postdoc at Princeton, currently professors at Georgia Technology CSE), whose understandings on browsing the unpredictable and affordable work market were both motivating and mind-blowing.
Could you inform us an intriguing (non-AI relevant) truth concerning you?
I am enthusiastic concerning winter sports. I discovered to ski mainly by vision-based replica understanding from a chairlift, though I’m absolutely paying the cost currently for inadequate generalization! Eventually, I want to construct an exoskeleton that instructs me to ski much better while maintaining me secure in high gear black rubies.
Regarding Haimin

|
Haimin Hu is an inbound Aide Teacher of Computer Technology at Johns Hopkins College, where he is additionally a participant of the Data Science and AI Institute, the Institute for Assured Autonomy, and theLaboratory for Computational Sensing and Robotics His research study concentrates on the mathematical structures of human-centered freedom. He has actually obtained a number of honors and acknowledgments, consisting of a 2025 Robotics: Scientific Research and Solution Leader, a 2025 Cyber-Physical Solution Climbing Celebrity, and a 2024 Human-Robot Communication Leader. In addition, he has actually functioned as a Partner Editor for IEEE Robotics and Automation Letters considering that his 4th year as a PhD pupil. He got a PhD in Electric and Computer System Design from Princeton College in 2025, an MSE in Electric Design from the College of Pennsylvania in 2020, and a remain in Digital and Info Design from ShanghaiTech College in 2018. |
发布者:AIhub,转转请注明出处:https://robotalks.cn/interview-with-haimin-hu-game-theoretic-integration-of-safety-interaction-and-learning-for-human-centered-autonomy/