


MIT scientists are making use of generative AI designs to aid robotics a lot more effectively address intricate item adjustment troubles, such as loading a box with various things. Picture: thanks to the scientists.
By Adam Zewe|MIT Information
Anybody that has actually ever before attempted to load a family-sized quantity of baggage right into a sedan-sized trunk understands this is a tough trouble. Robotics have problem with thick packaging jobs, as well.
For the robotic, resolving the packaging trouble entails pleasing several restrictions, such as piling baggage so travel suitcases do not fall out of the trunk, hefty things aren’t put on top of lighter ones, and crashes in between the robot arm and the automobile’s bumper are prevented.
Some conventional techniques tackle this trouble sequentially, presuming a partial remedy that fulfills one restraint each time and afterwards examining to see if any kind of various other restrictions were gone against. With a lengthy series of activities to take, and a heap of baggage to pack, this procedure can be impractically time consuming.
MIT scientists utilized a kind of generative AI, called a diffusion design, to address this trouble a lot more effectively. Their approach makes use of a collection of machine-learning designs, each of which is educated to stand for one certain kind of restraint. These designs are integrated to create international remedies to the packaging trouble, taking into consideration all restrictions simultaneously.
Their approach had the ability to create reliable remedies quicker than various other strategies, and it created a majority of effective remedies in the very same quantity of time. Significantly, their strategy was additionally able to address troubles with unique mixes of restrictions and bigger varieties of things, that the designs did not see throughout training.
As a result of this generalizability, their strategy can be utilized to show robotics just how to recognize and satisfy the general restrictions of packaging troubles, such as the significance of preventing crashes or a wish for one challenge be alongside one more item. Robotics learnt in this manner might be related to a large selection of intricate jobs in varied atmospheres, from order satisfaction in a storage facility to arranging a shelf in a person’s home.
” My vision is to press robotics to do a lot more complex jobs that have several geometric restrictions and even more continual choices that require to be made– these are the sort of troubles solution robotics deal with in our disorganized and varied human atmospheres. With the effective device of compositional diffusion designs, we can currently address these a lot more intricate troubles and obtain wonderful generalization outcomes,” claims Zhutian Yang, an electric design and computer technology college student and lead writer of a paper on this new machine-learning technique.
Her co-authors consist of MIT college students Jiayuan Mao and Yilun Du; Jiajun Wu, an assistant teacher of computer technology at Stanford College; Joshua B. Tenenbaum, a teacher in MIT’s Division of Mind and Cognitive Sciences and a participant of the Computer technology and Expert System Lab (CSAIL); Tomás Lozano-Pérez, an MIT teacher of computer technology and design and a participant of CSAIL; and elderly writer Leslie Kaelbling, the Panasonic Teacher of Computer Technology and Design at MIT and a participant of CSAIL. The study will certainly exist at the Seminar on Robotic Discovering.
Restraint issues
Continual restraint fulfillment troubles are especially testing for robotics. These troubles show up in multistep robotic adjustment jobs, like loading products right into a box or establishing a table. They commonly include attaining a variety of restrictions, consisting of geometric restrictions, such as preventing crashes in between the robotic arm and the atmosphere; physical restrictions, such as piling things so they are steady; and qualitative restrictions, such as positioning a spoon to the right of a blade.
There might be several restrictions, and they differ throughout troubles and atmospheres depending upon the geometry of things and human-specified needs.
To address these troubles effectively, the MIT scientists created a machine-learning strategy calledDiffusion-CCSP Diffusion designs find out to create brand-new information examples that look like examples in a training dataset by iteratively improving their result.
To do this, diffusion designs find out a treatment for making tiny renovations to a prospective remedy. After that, to address an issue, they begin with an arbitrary, extremely negative remedy and afterwards progressively enhance it.
Making use of generative AI designs, MIT scientists produced a method that might make it possible for robotics to effectively address continual restraint fulfillment troubles, such as packaging things right into a box while preventing crashes, as displayed in this simulation. Picture: Thanks to the scientists.
For instance, think of arbitrarily positioning plates and tools on a substitute table, enabling them to literally overlap. The collision-free restrictions in between things will certainly lead to them pushing each various other away, while qualitative restrictions will certainly drag home plate to the facility, line up the salad fork and supper fork, and so on
Diffusion designs are fit for this sort of continual constraint-satisfaction trouble due to the fact that the impacts from several designs on the present of one item can be made up to urge the fulfillment of all restrictions, Yang discusses. By beginning with an arbitrary preliminary hunch each time, the designs can get a varied collection of excellent remedies.
Collaborating
For Diffusion-CCSP, the scientists wished to catch the interconnectedness of the restrictions. In packaging as an example, one restraint may call for a particular challenge be alongside one more item, while a 2nd restraint may define where among those things need to lie.
Diffusion-CCSP discovers a household of diffusion designs, with one for each and every kind of restraint. The designs are educated with each other, so they share some understanding, like the geometry of the challenge be loaded.
The designs after that interact to locate remedies, in this situation places for the challenge be positioned, that collectively please the restrictions.
” We do not constantly reach a service at the initial hunch. However when you maintain improving the remedy and some infraction occurs, it needs to lead you to a much better remedy. You obtain support from obtaining glitch,” she claims.
Educating specific designs for each and every restraint kind and afterwards integrating them to make forecasts considerably minimizes the quantity of training information needed, contrasted to various other strategies.
Nonetheless, educating these designs still needs a big quantity of information that show resolved troubles. People would certainly require to address each trouble with conventional sluggish techniques, making the price to create such information too high, Yang claims.
Rather, the scientists turned around the procedure by developing remedies initially. They utilized rapid formulas to create fractional boxes and fit a varied collection of 3D things right into each section, making sure limited packaging, steady positions, and collision-free remedies.
” With this procedure, information generation is practically immediate in simulation. We can create 10s of hundreds of atmospheres where we understand the troubles are understandable,” she claims.
Educated making use of these information, the diffusion designs interact to identify places things must be positioned by the robot gripper that accomplish the packaging job while fulfilling every one of the restrictions.
They carried out usefulness researches, and afterwards showed Diffusion-CCSP with a genuine robotic resolving a variety of challenging troubles, consisting of suitable 2D triangulars right into a box, loading 2D forms with spatial partnership restrictions, piling 3D things with security restrictions, and packaging 3D things with a robot arm.

This number reveals instances of 2D triangular packaging. These are collision-free setups. Picture: thanks to the scientists.
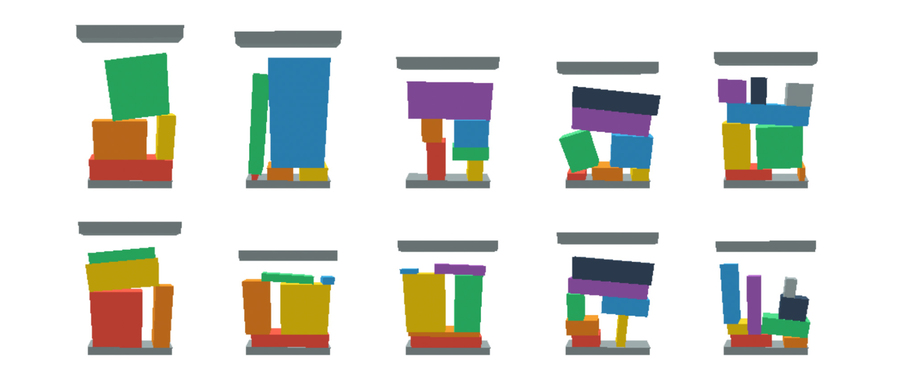
This number reveals 3D item piling with security restrictions. Scientists state a minimum of one item is sustained by several things. Picture: thanks to the scientists.
Their approach outmatched various other strategies in several experiments, producing a majority of reliable remedies that were both steady and collision-free.
In the future, Yang and her partners wish to check Diffusion-CCSP in a lot more complex circumstances, such as with robotics that can walk around a space. They additionally wish to make it possible for Diffusion-CCSP to deal with troubles in various domain names without the requirement to be re-trained on brand-new information.
” Diffusion-CCSP is a machine-learning remedy that improves existing effective generative designs,” claims Danfei Xu, an assistant teacher in the Institution of Interactive Computer at the Georgia Institute of Modern Technology and a Study Researcher at NVIDIA AI, that was not included with this job. “It can swiftly create remedies that all at once please several restrictions by making up recognized specific restraint designs. Although it’s still in the very early stages of growth, the recurring developments in this strategy hold the assurance of making it possible for a lot more reliable, secure, and trusted self-governing systems in numerous applications.”
This study was moneyed, partially, by the National Scientific Research Structure, the Flying Force Workplace of Scientific Study, the Workplace of Naval Study, the MIT-IBM Watson AI Laboratory, the MIT Pursuit for Knowledge, the Facility for Minds, Minds, and Makers, Boston Characteristics Expert System Institute, the Stanford Institute for Human-Centered Expert System, Analog Gadgets, JPMorgan Chase and Co., and Salesforce.
发布者:MIT News,转转请注明出处:https://robotalks.cn/new-technique-helps-robots-pack-objects-into-a-tight-space/