
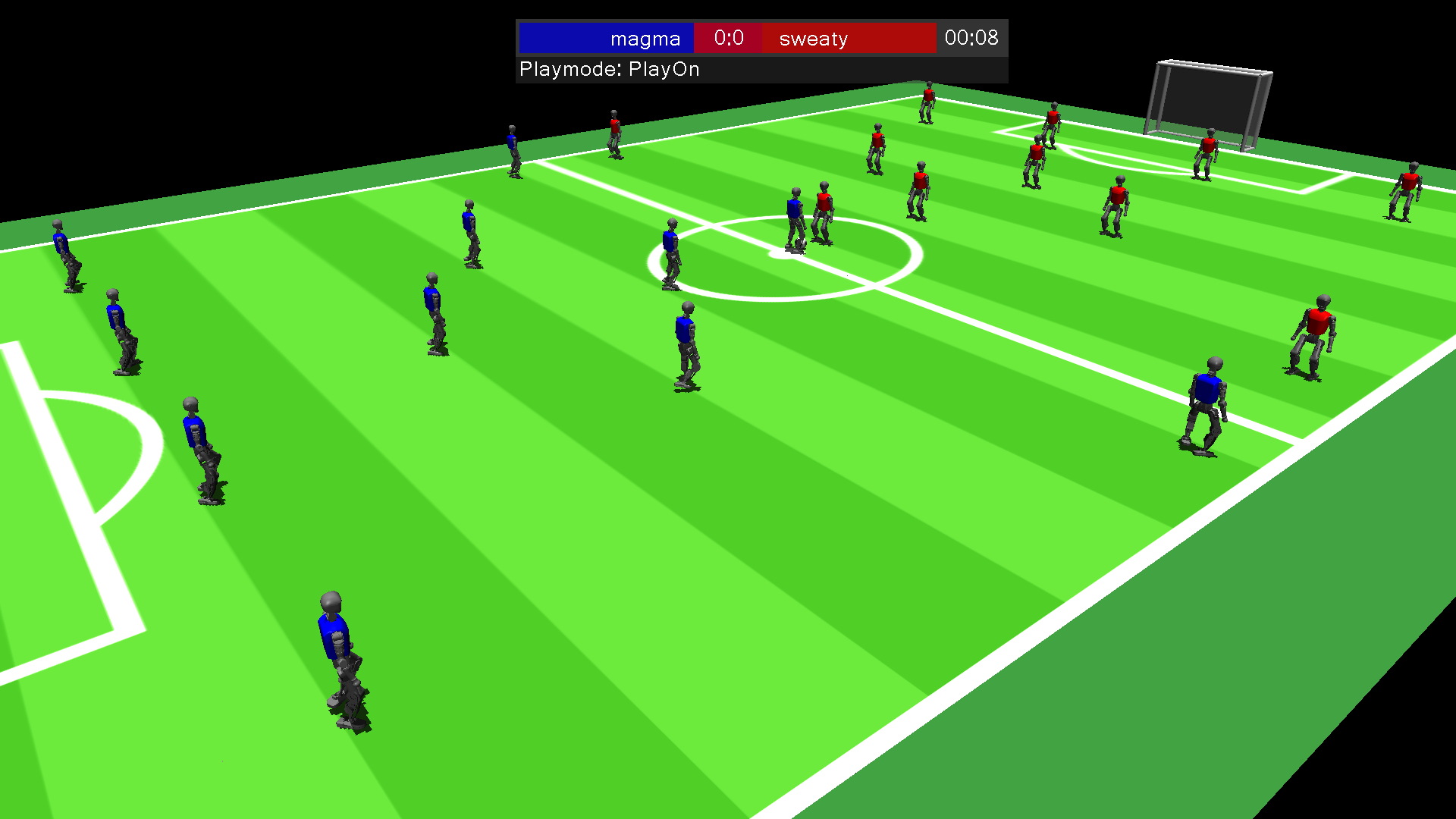
 A screenshot from the brand-new simulator that will certainly be trialled for an unique difficulty at RoboCup2025.
A screenshot from the brand-new simulator that will certainly be trialled for an unique difficulty at RoboCup2025.
The yearly RoboCup occasion, where groups collect from around the world to participate in competitors throughout a variety of organizations, will certainly this year happen in Brazil, from 15-21 July. Before kick-off, we talked with 2 participants of the RoboCup Football 3D Simulation Organization: Exec Board Participant Klaus Dorer, and Stefan Glaser, that gets on the Upkeep Board and that has actually been just recently creating a brand-new simulator for the Organization.
Could begin by simply offering us a fast intro to the Simulation League?
Klaus Dorer: There are 2 Simulation Leagues in Football: the 2D Simulation Organization and the 3D Simulation Organization. The 2D Simulation Organization, as the name recommends, is a level organization where the gamers and sphere are substitute with streamlined physics and the major emphasis gets on group method. The 3D Simulation League is a lot closer to actual robotics; it mimics 11 versus 11 Nao robotics. The degree of control resembles with actual robotics, where you relocate each electric motor of the legs and the arms and more to attain activity.
I comprehend that you have actually been servicing a brand-new simulator for the 3D Organization. What was the concept behind this brand-new simulator?
Klaus: The purpose is to bring us closer to the equipment organizations to make sure that the simulator can be better. The present simulator that we make use of in the 3D Simulation Organization is called SimSpark. It was produced in the very early 2000s with the purpose of making it feasible to play 11 vs 11 gamers. With the equipment restraints of that time, there needed to be some concessions on the physics to be able to imitate 22 gamers at the exact same time. So the simulation is literally rather reasonable, however not in the feeling that it’s very easy to shift it to a genuine Nao robotic.
Stefan Glaser: The concept for creating a brand-new simulator has actually been around for a couple of years. SimSpark is a really effective simulation structure. The base structure is domain name independent (not football particular) and particular simulations are recognized through plugins. It sustains numerous physics engines in the backend and supplies a versatile scripting user interface for setup and adjustments of the simulation. Nevertheless, all this versatility includes the rate of intricacy. Along with that, SimSpark makes use of custom-made robotic version requirements and interaction methods, restricting the quantity of offered robotic versions and calling for groups to establish custom-made interaction layers just for interacting with SimSpark. As an outcome of this, SimSpark has actually not been extensively taken on in the RoboCup area.
With the brand-new simulator, I want to attend to these 2 significant concerns: intricacy and standardization. In the ML area, the MuJoCo physics engine has actually ended up being a preferred selection for finding out settings after Google DeepMind obtained it and launched it open resource. Its requirements for globe and robotic version requirements are extensively taken on in the area and there exist a great deal of ready-to-use robotic version requirements for a wide range of digital in addition to real-world robotics. In the center of in 2015, they (MuJoCo) included a function which enables you to control the globe depiction throughout simulation (including and getting rid of challenge/ from the simulation while maintaining the simulation state). This is one vital need we have in the simulation organization, where we begin with a vacant area and afterwards the representatives link as needed and create the groups. When this function has actually been included, I chose to make a progression and attempt to apply a brand-new simulator for the 3D Simulation Organization based upon MuJoCo. Originally, I wished to begin growth in C/C++ to attain optimal efficiency, however after that chose to begin in Python to minimize intricacy and make it much more available for various other designers. I began growth on Easter Monday so it’s not also 3 months old!
I assume it may be valuable to clarify a bit much more regarding the arrangement of our organization and the demands of the simulator. If we take the FIFA video game (on your preferred pc gaming tool) as an instance, there is one simulation occurring which mimics 22 gamers and the choice production becomes part of the simulation having complete accessibility to the state of the globe. In the 3D Simulation Organization we have 2 groups with 11 robotics on the area, however we likewise have 22 specific representative software applications which are attached to the simulation web server, each regulating one solitary robotic. Each linked representative just obtains sensing unit details pertaining to their robotic in the simulation. They are likewise just enabled to connect through the web server– there is no straight interaction in between the representatives admitted Simulation Organization. So we have a basic arrangement where the simulation web server needs to have the ability to approve approximately 22 links and handle the circumstance there. This performance has actually been the significant emphasis for me for the last number of months and this component is currently functioning well. Groups can link their representatives, which will certainly get sensing unit details and can activate joints of the robotic in the simulation and more. They are likewise able to choose various robotic versions if they such as.
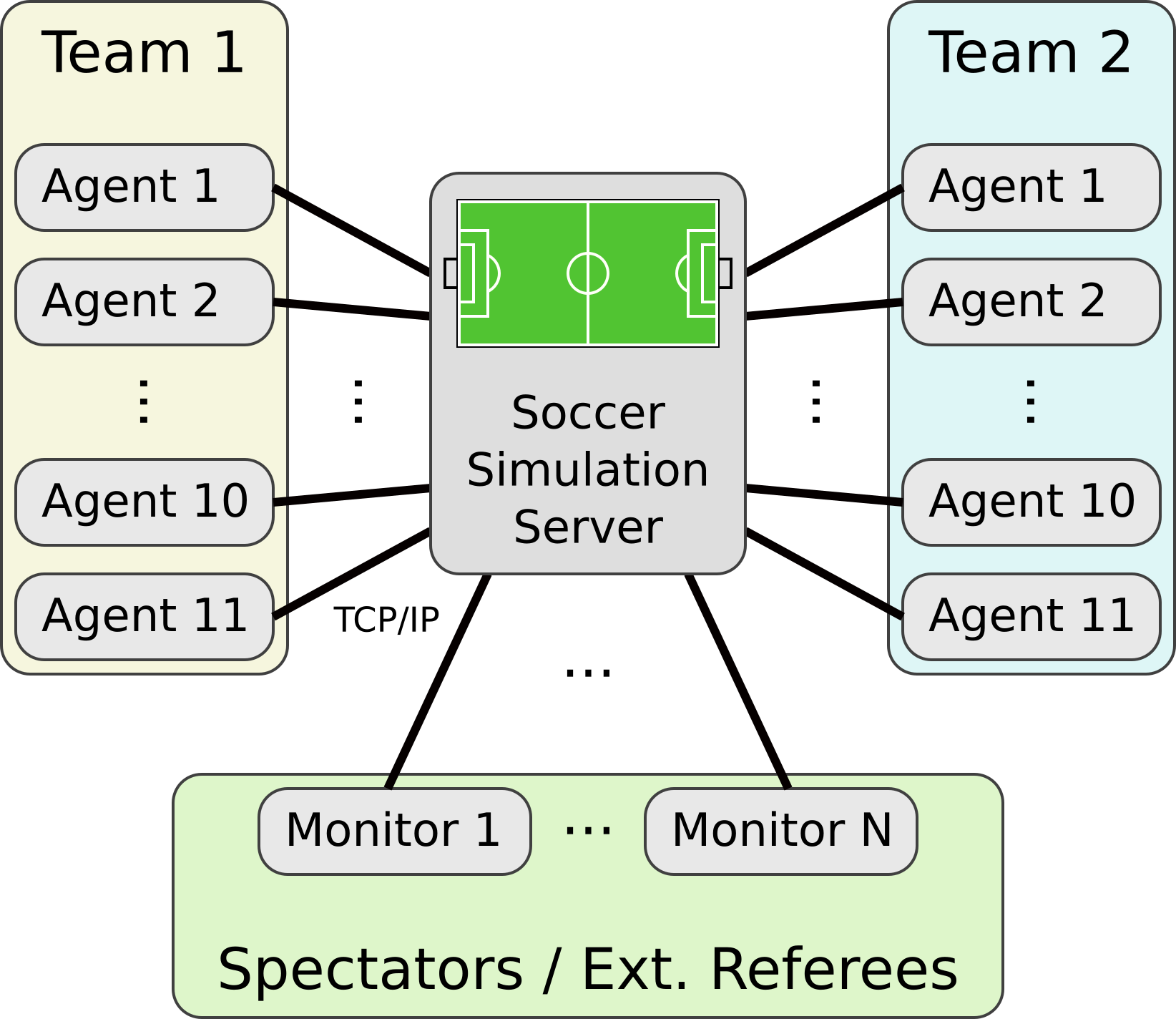 An image of the simulator set up.
An image of the simulator set up.
Probably the brand-new simulator has a much better depiction of the physics of a genuine robotic.
Klaus: Specifically. For instance, exactly how the electric motors are managed is currently a bit various and a lot closer to actual robotics. So when I did my initial experiments, I saw the robotic collapse and I believed it was precisely just how a genuine robotic would certainly break down! In SimSpark we likewise had dropping robotics however the electric motor control in the brand-new simulator is various. Currently you can regulate the electric motors by rate, forcibly, by placement, which is a lot more versatile– it’s closer to what we understand from actual robotics.
I assume that, at the very least originally, it will certainly be harder for the Simulation Organization groups to obtain the robotics to do what they desire them to do, since it’s even more reasonable. For instance, in SimSpark the ground get in touch with was a lot more flexible. So if you tip hard on the ground, you do not drop promptly with a SimSpark robotic however with a MuJoCo robotic this will certainly be a lot more reasonable. Without a doubt, in actual robotics ground get in touch with is rather much less flexible.
I had a concern regarding the vision element– exactly how do the specific representatives “see” the placement of the various other representatives on the area?
Stefan: We imitate an online vision pipe on the web server side. You have a limited field of vision of ± 60 ° flat and up and down. Within that field of vision you will certainly identify the head, the arms, the feet of various other gamers, or the sphere, for instance, or various attributes of the area. Comparable to typical real-world vision pipes, each discovery includes a tag, an instructions vector and the range details. The details has some sound on it like actual robotics have, also, however groups do not require to refine video camera pictures. They obtain the discoveries straight from the simulation web server.
We have actually formerly had a conversation regarding relocating in the direction of obtaining video camera pictures of the simulation to incorporate right into the vision pipe on the representative side. This was never ever truly reasonable in SimSpark with the application we had there. Nevertheless, it needs to be feasible with MuJoCo. Nevertheless, for the initial variation, I made use of similarly the typical simulator dealt with the vision. This suggests that groups do not require to educate a vision version, and do not require to manage video camera pictures to get going. This lowers the tons considerably and likewise changes the emphasis of the issue in the direction of movement and choice production.
Will the simulator be made use of at RoboCup 2025?
Stefan: We prepare to have an obstacle with a brand-new simulator and I will certainly attempt to offer some demonstration video games. Right now it’s not truly in a state where you can play an entire competitors.
Klaus: That’s normally exactly how we wage brand-new simulators. We would certainly stagnate from one to the various other with no intermediate action. We will certainly have an obstacle this year at RoboCup 2025 with the brand-new MuJoCo simulator where each taking part group will certainly attempt to show the robotic to kick regarding feasible. So, we will certainly not be playing an entire video game, we will not have numerous robotics, simply a solitary robotic actioning in front of the sphere and kicking the sphere. That’s the technological difficulty for this year. Groups will certainly obtain a concept of exactly how the simulator functions, and we’ll obtain a concept of what needs to be altered in the simulator to continue.
This brand-new difficulty will certainly be volunteer, so we are unsure the amount of groups will certainly get involved. Our group (MagmaOffenburg) will definitely participate. It will certainly interest see exactly how well the groups carry out since nobody understands exactly how much a great kick remains in this simulator. It’s a little bit like in Solution One when the guidelines alter and nobody understands which group will certainly be the leading group.
Do you have a concept of just how much adjustment groups will need to make if and when you transfer to the brand-new simulator for the complete suits?
Stefan: As a lasting participant of 3D Simulation Organization, I understand the old simulator SimSpark rather well, and understand the methods entailed and exactly how the procedures function. So the initial variation of the brand-new simulator is created to make use of the exact same standard method, the exact same sensing unit details, and more. The concept is that the groups can make use of the brand-new simulator with very little initiative in adjusting their present representative software application. So they must have the ability to get going rather quick.
Although, when developing a brand-new system, I want to seize the day to make a progression in regards to methods, since I likewise intend to incorporate various other Leagues in the long-lasting. They normally have various other control devices, and they do not make use of the exact same method that projects in 3D Simulation. For that reason there needs to be some versatility in the future. However, for the initial variation, the concept was to obtain the Simulation Organization all set with very little initiative.
Klaus: The large concept is that this is not simply made use of in the 3D Simulation organization, however likewise as a helpful simulator for the Humanoid Organization and likewise for the Criterion System Organization (SPL). So if that ends up being real, after that it will certainly be entirely effective. For the Kick Obstacle this year, for instance, we make use of a T1 robotic that is a Humanoid Organization robotic.
Could you state something regarding this simulation to real life (Sim2Real) element?
Stefan: We would certainly like it to be feasible for the movements and habits in the simulator to be ported to actual robotics. From my perspective, it would certainly work the various other method round also.
We, as a Simulation Organization, normally establish for the Simulation Organization and for that reason want to obtain the habits operating on a genuine robotic. However the equipment groups normally have a comparable problem when they intend to evaluate top-level choice production. They may have 2 to 5 robotics on the area, and if they intend to play a top-level decision-making suit and train in that respect, they constantly need to release a great deal of robotics. If they likewise intend to have a challenger, they need to increase the quantity of robotics in order to play a video game to see exactly how the method would certainly end up. The Sim2Real element is likewise intriguing for these groups, since they must have the ability to take what they released on the actual robotic and it must likewise operate in the simulation. They can after that make use of the simulation to educate top-level abilities like interplay, gamer positioning and more, which is a tough element for the actual robotic organizations like SPL or the Humanoid Leagues.
Klaus: And the factor we understand this is since we have a group in the Simulation Organization and we have a group in the Humanoid Organization. To ensure that’s an additional reason that we are eager to bring these points closer with each other.
Just how does the refereeing operate in the Simulation Organization?
Klaus: A wonderful aspect of Simulation Leagues is that there is a program which understands the actual state of the globe so we can integrate in the umpire inside the simulator and it will certainly not fall short. For points like offside, whether the sphere passed the objective line, that’s fall short risk-free. All the umpire choices are taken by the system itself. We have a human umpire however they never ever require to step in. Nevertheless, there are scenarios where we would certainly such as expert system to contribute. This is not presently the situation in SimSpark since the guidelines are all tough coded. We have a great deal of fouls that are open to question. For instance, there are numerous fouls that groups concur must not have actually been a nasty, and various other fouls that are not called that must have been. It would certainly be a good AI finding out job to obtain some scenarios evaluated by human umpires and afterwards educate an AI version to far better establish the guidelines wherefore is a nasty and what isn’t a nasty. However this is presently not the situation.
Stefan: On the brand-new simulator I am not that much right into the growth that I have actually applied the automated umpire yet. I have some standard collection of guidelines which proceed the video game therefore, however evaluating fouls and picking unique scenarios is not yet applied in the brand-new simulator.
What are the following actions for creating the simulator?
Stefan: Among the following significant actions will certainly be to improve the physics simulation. For example, although there exists a round in the simulation, it is not yet truly well fine-tuned. There are a great deal of physics specifications which we need to select to mirror the real life like feasible. This will likely need a collection of experiments to get to the right worths for numerous facets. In this element I’m wishing for some interaction of the area, as it is a wonderful study chance and I directly would choose the area to select a frequently approved specification collection based upon a degree of proof that I can not conveniently offer all by myself. So in situation a person wants improving the physics of the simulation such that it finest shows the real life, you rate to sign up with!
One more significant following action will certainly be the growth of the automated umpire of the football simulation, picking fouls, managing misbehaving representatives and more. In the initial variation, nasty problems will likely be evaluated by an experienced system especially created for this function. The simulation organization has actually established a collection of nasty problem requirements which I prepare to adjust. In a 2nd action, I want to incorporate and sustain the growth of AI based nasty discovery versions. However yes, one action after the various other.
What are you specifically anticipating at RoboCup2025?
Klaus: Well, with our group we have actually been vice globe champseven times in a row This year we are truly intending to make it to globe champ. We are really experienced in obtaining losses in finals and this year we are anticipating transforming that, from a group point of view.
Stefan: I’m mosting likely to Brazil in order to advertise the simulator, not simply for the Simulation Organization, however likewise throughout the borders for the Humanoid Leagues and the SPL Leagues. I assume that this simulator is a wonderful possibility to bring individuals from all the organizations with each other. I’m specifically curious about the particular demands of all the groups of the various organizations. This understanding will certainly assist me customize the brand-new simulator in the direction of their demands. This is just one of my significant highlights for this year, I would certainly state.
You can learn even more regarding the brand-new simulator at the project webpage, and from the documentation.

|
Klaus Dorer is teacher for expert system, independent systems and software application design at Offenburg College, Germany. He is likewise a participant of the Institute for Artificial Intelligence and Analytics IMLA. He has actually been group leader of the RoboCup simulation organization groups magmaFreiburg (because 1999), living systems, magmaFurtwangen and is currently group leader of magmaOffenburg because 2009. Given that 2014, he has actually likewise belonged to the humanoid grown-up dimension organization group Sweaty. |

|
Stefan Glaser is instructing aide for expert system and smart independent systems at the Offenburg College, Germany. He has actually belonged to the RoboCup simulation organization group magmaOffenburg because 2009 and the RoboCup humanoid grown-up dimension organization group Sweaty because 2014. |
发布者:AIhub,转转请注明出处:https://robotalks.cn/tackling-the-3d-simulation-league-an-interview-with-klaus-dorer-and-stefan-glaser/