
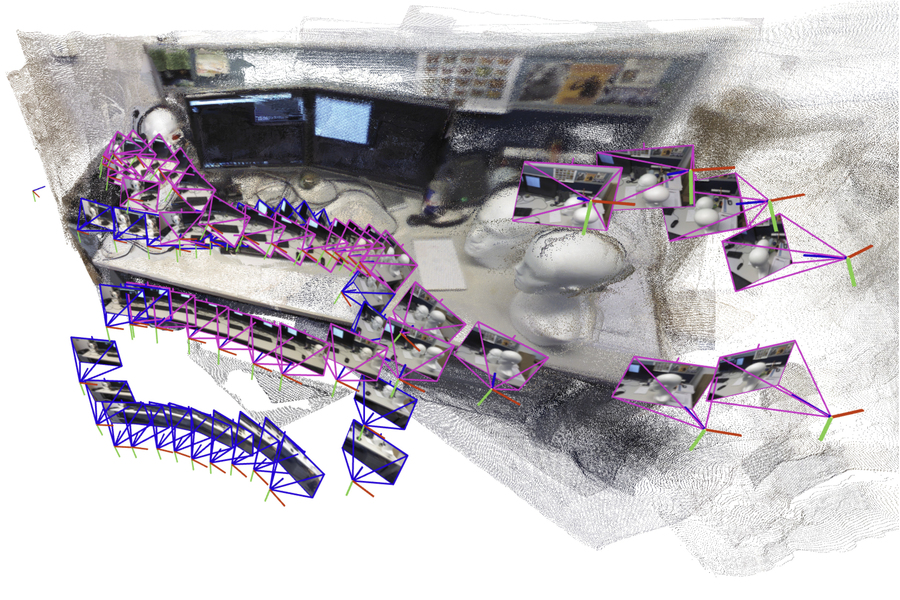
 The man-made intelligence-driven system incrementally develops and lines up smaller sized submaps of the scene, which it stitches with each other to rebuild a complete 3D map, like of a workplace work area, while approximating the robotic’s placement in real-time. Photo thanks to the scientists.
The man-made intelligence-driven system incrementally develops and lines up smaller sized submaps of the scene, which it stitches with each other to rebuild a complete 3D map, like of a workplace work area, while approximating the robotic’s placement in real-time. Photo thanks to the scientists.
By Adam Zewe
A robotic looking for employees entraped in a partly fallen down mine shaft need to quickly create a map of the scene and determine its place within that scene as it browses the treacherous surface.
Scientists have actually just recently begun developing effective machine-learning designs to execute this facility job making use of just photos from the robotic’s onboard cams, however also the most effective designs can just refine a couple of photos each time. In a real-world catastrophe where every 2nd matters, a search-and-rescue robotic would certainly require to rapidly go across huge locations and procedure countless photos to finish its goal.
To conquer this trouble, MIT scientists made use of concepts from both current expert system vision designs and classic computer system vision to establish a brand-new system that can refine an approximate variety of photos. Their system properly creates 3D maps of difficult scenes like a congested workplace passage immediately.
The AI-driven system incrementally develops and lines up smaller sized submaps of the scene, which it stitches with each other to rebuild a complete 3D map while approximating the robotic’s placement in real-time.
Unlike numerous various other techniques, their method does not need adjusted cams or a professional to tune an intricate system execution. The less complex nature of their method, combined with the rate and top quality of the 3D restorations, would certainly make it much easier to scale up for real-world applications.
Past assisting search-and-rescue robotics browse, this approach can be made use of to make prolonged fact applications for wearable tools like virtual reality headsets or make it possible for commercial robotics to rapidly discover and relocate items inside a storage facility.
” For robotics to complete progressively complicated jobs, they require a lot more complicated map depictions of the globe around them. However at the very same time, we do not intend to make it more difficult to apply these maps in method. We have actually revealed that it is feasible to create an exact 3D restoration immediately with a device that functions out of package,” states Dominic Maggio, an MIT college student and lead writer of a paper on this method.
Maggio is signed up with on the paper by postdoc Hyungtae Lim and elderly writer Luca Carlone, associate teacher in MIT’s Division of Aeronautics and Astronautics (AeroAstro), primary detective busy for Details and Choice Solution (LIDS), and supervisor of the MIT Flicker Lab. The study will certainly exist at the Meeting on Neural Data Processing Solutions.
Mapping out a remedy
For several years, scientists have actually been coming to grips with a vital component of robot navigating called synchronised localization and mapping (BANG). In bang, a robotic recreates a map of its atmosphere while orienting itself within the room.
Typical optimization techniques for this job have a tendency to fall short in difficult scenes, or they need the robotic’s onboard cams to be adjusted ahead of time. To prevent these challenges, scientists educate machine-learning designs to discover this job from information.
While they are less complex to apply, also the most effective designs can just refine around 60 electronic camera photos each time, making them infeasible for applications where a robotic requires to relocate rapidly with a diverse atmosphere while refining countless photos.
To resolve this trouble, the MIT scientists developed a system that creates smaller sized submaps of the scene as opposed to the whole map. Their approach “adhesives” these submaps with each other right into one total 3D restoration. The design is still just refining a couple of photos each time, however the system can recreate bigger scenes a lot quicker by sewing smaller sized submaps with each other.
” This felt like a really basic option, however when I initially attempted it, I was amazed that it really did not function that well,” Maggio states.
Searching for a description, he explored computer system vision study documents from the 1980s and 1990s. With this evaluation, Maggio recognized that mistakes in the method the machine-learning designs procedure photos made lining up submaps a much more complicated trouble.
Typical techniques line up submaps by using turnings and translations up until they align. However these brand-new designs can present some uncertainty right into the submaps, that makes them more difficult to line up. For example, a 3D submap of a one side of an area may have wall surfaces that are somewhat curved or extended. Merely turning and equating these warped submaps to straighten them does not function.
” We require to make certain all the submaps are warped in a constant method so we can straighten them well with each various other,” Carlone discusses.
An even more adaptable method
Loaning concepts from classic computer system vision, the scientists created a much more adaptable, mathematical method that can stand for all the contortions in these submaps. By using mathematical improvements per submap, this even more adaptable approach can straighten them in a manner that addresses the uncertainty.
Based upon input photos, the system outputs a 3D restoration of the scene and price quotes of the electronic camera areas, which the robotic would certainly make use of to center itself in the room.
” As Soon As Dominic had the instinct to link these 2 globes– learning-based techniques and standard optimization techniques– the execution was relatively uncomplicated,” Carlone states. “Thinking of something this reliable and basic has possibility for a great deal of applications.
Their system executed much faster with much less restoration mistake than various other techniques, without needing unique cams or added devices to refine information. The scientists created close-to-real-time 3D restorations of complicated scenes like the within the MIT Church making use of just brief video clips recorded on a cellular phone.
The ordinary mistake in these 3D restorations was much less than 5 centimeters.
In the future, the scientists intend to make their approach a lot more dependable for specifically made complex scenes and pursue executing it on actual robotics in difficult setups.
” Learning about standard geometry settles. If you comprehend deeply what is taking place in the design, you can obtain better outcomes and make points a lot more scalable,” Carlone states.
This job is sustained, partly, by the United State National Scientific Research Structure, United State Workplace of Naval Study, and the National Study Structure of Korea. Carlone, presently on sabbatical as an Amazon Scholar, finished this job prior to he signed up with Amazon.
发布者:MIT News,转转请注明出处:https://robotalks.cn/teaching-robots-to-map-large-environments-2/