
 The scientists showed that the creeping plant robotic can securely and stably raise a range of hefty and vulnerable things, like a watermelon. Picture debt: Thanks to the scientists
The scientists showed that the creeping plant robotic can securely and stably raise a range of hefty and vulnerable things, like a watermelon. Picture debt: Thanks to the scientists
By Jennifer Chu
In the gardening globe, some creeping plants are particularly hoggish. As they expand, the woody tendrils can twist around challenges with sufficient pressure to take down whole fencings and trees.
Influenced by creeping plants’ twisty persistence, designers at MIT and Stanford College have actually established a robot gripper that can serpent around and raise a range of things, consisting of a glass flower holder and a watermelon, supplying a gentler technique contrasted to traditional gripper layouts. A bigger variation of the robo-tendrils can additionally securely raise a human out of bed.
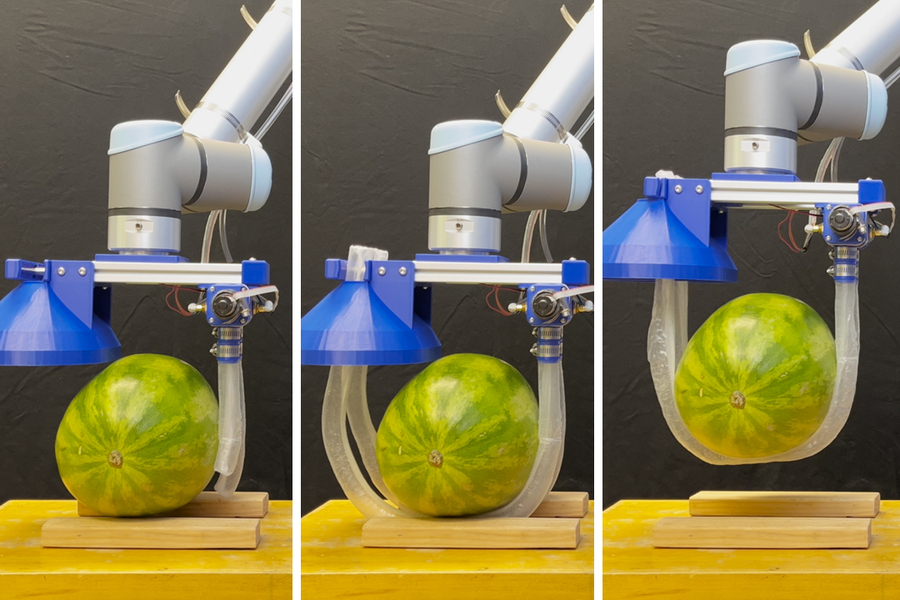
The brand-new crawler contains a pressurized box, placed near the target item, where long, vine-like tubes blow up and expand, like socks being transformed within out. As they prolong, the creeping plants spin and coil around the item prior to proceeding back towards package, where they are instantly secured in position and mechanically wound back up to delicately raise the item in a soft, sling-like understanding.
The scientists showed that the creeping plant robotic can securely and stably raise a range of hefty and vulnerable things. The robotic can additionally press with limited quarters and press with mess to get to and comprehend a preferred item.
The group visualizes that this sort of robotic gripper might be utilized in a wide variety of situations, from farming harvesting to filling and discharging hefty freight. In the close to term, the team is checking out applications in eldercare setups, where soft blow up robot creeping plants might assist to delicately raise an individual out of bed.
” Moving an individual out of bed is among one of the most literally exhausting jobs that a caretaker accomplishes,” states Kentaro Barhydt, a PhD prospect in MIT’s Division of Mechanical Design. “This type of robotic can assist alleviate the caretaker, and can be gentler and a lot more comfy for the person.”
Barhydt, together with his co-first writer from Stanford, O. Godson Osele, and their coworkers,present the new robotic design in the journal Science Advances The research’s co-authors are Harry Asada, the Ford Teacher of Design at MIT, and Allison Okamura, the Richard W. Weiland Teacher of Design at Stanford College, together with Sreela Kodali and Cosmia du Pasquier at Stanford College, and previous MIT college student Chase Hartquist, currently at the College of Florida, Gainesville.
Open up and shut
 As they prolong, the creeping plants spin and coil around the item prior to proceeding back towards package, where they are instantly secured in position and mechanically wound back up to delicately raise the item in a soft, sling-like understanding. Picture debt: Thanks to the scientists
As they prolong, the creeping plants spin and coil around the item prior to proceeding back towards package, where they are instantly secured in position and mechanically wound back up to delicately raise the item in a soft, sling-like understanding. Picture debt: Thanks to the scientists
The group’s Stanford partners, led by Okamura, spearheaded the growth of soft, vine-inspired robotics that expand outside from their suggestions. These layouts are mostly developed from slim yet strong pneumatically-driven tubes that expand and blow up with regulated atmospheric pressure. As they expand, televisions can turn, flex, and serpent their means with the atmosphere, and press with limited and messy rooms.
Scientists have actually mainly discovered creeping plant robotics for usage in security evaluations and search and rescue procedures. Yet at MIT, Barhydt and Asada, whose team has actually established robot assistants for the senior, asked yourself whether such vine-inspired robotics might attend to specific obstacles in eldercare– particularly, the difficulty of securely raising an individual out of bed. Typically in nursing and rehab setups, this transfer procedure is performed with a client lift, run by a caretaker that should initially literally relocate a client onto their side, after that back onto a hammock-like sheet. The caretaker straps the sheet around the person and hooks it onto the mechanical lift, which after that can delicately lift the person out of bed, comparable to putting on hold a hammock or sling.
The MIT and Stanford group envisioned that as an option, a vine-like robotic might delicately serpent under and around a client to develop its very own kind of sling, without a caretaker needing to literally steer the person. Yet in order to raise the sling, the scientists understood they would certainly need to include a component that was missing out on in existing creeping plant robotic layouts: Basically, they would certainly need to shut the loophole.
A lot of vine-inspired robotics are developed as “open-loop” systems, suggesting they work as flexible strings that can prolong and flex in various setups, however they are not developed to safeguard themselves to anything to develop a shut loophole. If a creeping plant robotic might be made to change from an open loophole to a shut loophole, Barhydt assumed that it might make itself right into a sling around the item and draw itself up, together with whatever, or whomever, it could hold.
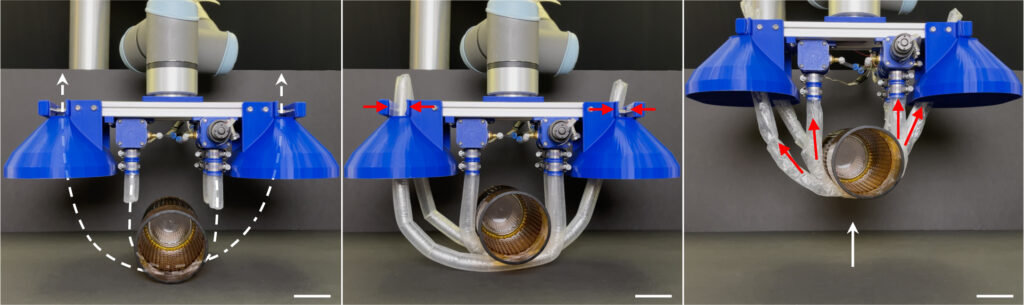
For their brand-new research, Barhydt, Osele, and their coworkers detail the layout for a brand-new vine-inspired robot gripper that integrates both open- and closed-loop activities. In an open-loop arrangement, a robot creeping plant can expand and turn around a challenge develop a strong understanding. It can also delve under a human pushing a bed. When an understanding is made, the creeping plant can remain to expand back towards and affix to its resource, developing a shut loophole that can after that be withdrawed to obtain the item.
” Individuals could think that in order to get hold of something, you simply connect and order it,” Barhydt states. “Yet there are various phases, such as placing and holding. By changing in between open and shut loopholes, we can attain brand-new degrees of efficiency by leveraging the benefits of both types for their particular phases.”
Mild suspension
As a presentation of their brand-new open- and closed-loop principle, the group developed a large robot system developed to securely raise an individual up from a bed. The system makes up a collection of pressurized boxes affixed on either end of an overhanging bar. An air pump inside packages gradually pumps up and opens up slim vine-like tubes that prolong down towards the head and foot of a bed. The atmospheric pressure can be regulated to delicately function televisions under and around an individual, prior to extending back up to their particular boxes. The creeping plants after that string with a securing device that protects the creeping plants per box. A winch winds the creeping plants back up towards packages, delicately raising the individual up at the same time.
” Hefty however vulnerable things, such as a body, are challenging to comprehend with the robot hands that are offered today,” Asada states. “We have actually established a vine-like, expanding robotic gripper that can twist around a things and suspend it delicately and safely.”
” There’s a whole layout room we wish this job influences our coworkers to remain to discover,” states co-lead writer Osele. “I particularly eagerly anticipate the ramifications for person transfer applications in healthcare.”
” I am extremely delighted concerning future job to make use of robotics like these for literally helping individuals with movement obstacles,” includes co-author Okamura. “Soft robotics can be reasonably secure, affordable, and efficiently developed for particular human demands, unlike various other methods like humanoid robotics.”
While the group’s layout was encouraged by obstacles in eldercare, the scientists understood the brand-new layout might additionally be adjusted to execute various other comprehending jobs. Along with their large system, they have actually developed a smaller sized variation that can affix to an industrial robot arm. With this variation, the group has actually revealed that the creeping plant robotic can comprehend and raise a range of hefty and vulnerable things, consisting of a watermelon, a glass flower holder, a pot bell, a pile of steel poles, and a play area round. The creeping plants can additionally serpent with a messy container to take out a preferred item.
” We assume this type of robotic layout can be adjusted to lots of applications,” Barhydt states. “We are additionally thinking of using this to hefty market, and points like automating the procedure of cranes at ports and storage facilities.”
This job was sustained, partially, by the National Scientific Research Structure and the Ford Structure.
发布者:MIT News,转转请注明出处:https://robotalks.cn/vine-inspired-robotic-gripper-gently-lifts-heavy-and-fragile-objects-3/