

June 25, 2024
Authors: Liisa Pesonen, Natural Resources Institute Finland (Luke), Finland; Daniel Calvo Alonso, Atos, Spain; Juha Backman and Jere Kaivosoja, Natural Resources Institute Finland (Luke), Finland; Jarmi Recio Martinez, Atos, Spain; and Juha-Pekka Soininen, VTT Technical Study Centre of Finland, Finland
Display: The below is an excerpt from ‘Advances in connectivity and disbursed intelligence in agricultural robotics’ which aspects as Chapter 8 within the e-book Advances in agri-meals robotics.
Introduction
Robots will even be feeble in loads of sorts of farms to encourage or change human work in heavy, unhealthy, boring or high accuracy wanting tasks, or when the provision of labour is little (Basri et al., 2021). Computerized milking systems (AMS), also identified as milking robots, are broadly feeble service robots in cattle farming, at the side of extra and extra usual feeding and cleansing robots (John et al., 2016; Stülpner et al., 2014). In horticulture, loads of various approaches for harvesting robots in greenhouses maintain been launched (Bachche, 2015), and farm implementations are gradually gaining ground. Weeding and pest shield watch over robots maintain been developed for orchards and vineyards (Horizon The EU Study and Innovation Journal).

Numerous pot- and bin-dealing with robots for each and each greenhouses and orchards maintain been designed to encourage in heavy and monotonic tasks (Ye et al., 2018). Additionally in arable farming, loads of business field robots maintain been launched and come in in markets: drones for loads away sensing and ground robots in a position to harrowing, weeding, fertilising and seeding (e.g. AgroIntelli, FarmDroid ). Nonetheless, the adoption of robotic systems in train has been unhurried in arable farming.
Meaningful train of robots in farms requires neat, particular person-pleasant and the circumstance-adaptive capabilities. Right here’s refined to shield out since farms are aggravating worksite environments for self reliant machines. Farm operations hyperlink with loads of farm tasks, heterogeneous machinery and decision toughen systems and contributors and animals (Fountas et al., 2015; Köksal and Tekinerdogan, 2019).
Agricultural robots must be successfully linked with other actors within the farm operations they attain as successfully as with supporting products and services (Berenstein and Edan, 2017; Vasconez et al., 2019; Anagnostis et al., 2021). Robots also must mediate info from their operations for extra train in meals systems since on the present time’s info-driven meals systems require info or info-based entirely mostly info from agriculture about its manufacturing processes, i.e. field operations and manufacturing environments to aim successfully and safely, and to crimson meat up sustainability in a documented manner (Miranda et al., 2019; Corallo et al., 2018).
For larger adoption, namely smallholders safe pleasure from robotic systems that provide successfully-tailored, easy-to-train machine entities. Smallholders maintain little financial ability to make train of workers, namely when the labour is wished ideally suited seasonally. On the entire, the farmer himself executes the well-known piece of farm tasks and takes care of farm management and agencies in parallel. To be helpful working companions, the robots, as any automation machine, must be successfully linked to other farm systems and to the robotic’s upkeep systems, and the provision of the robotic’s products and services desires to suit successfully to generally individual farm conditions and farmer’s preferences (Pesonen et al., 2008).

In this sense, operation environments in arable farming utter basically the most aggravating flexibility and configurability demands for robotic systems. Arable farms fluctuate in slit option, manufacturing recommendations and recommendations, farm size and technological infrastructure thereof. Arable fields scenario gargantuan land areas in diverse topographic and (micro)climate environments (The World Financial institution ). Thus, the operational environments in arable farming can’t be standardised in one arrangement it’s conceivable in indoor animal manufacturing or greenhouses. Farm fields come all the arrangement in which thru generally in rural areas and within the gap from a farm’s physical operation centre, which challenges capabilities for monitoring, shield watch over and logistics of robotic systems. There would possibly be no electrical energy network accessible within the fields, and since arable fields are operated with transferring machines, the wished conversation requires continuously wireless connections. Arable farming worksites are originate environments that define robots to diverse weather stipulations; transferring obstacles like contributors, animals and other machines; and changing working companions as a result of which connections to supporting products and services are an vital (Steen et al., 2012; Kaloxylos et al., 2012; Goap et al., 2018). The flexibility to achieve snappily reactions and proportionate modifications in plans challenges no longer ideally suited the connections to supporting network of products and services and other machines but also the intelligence of robotic systems. Thus, this chapter focusses mainly on arable farming and concerns encountered there.
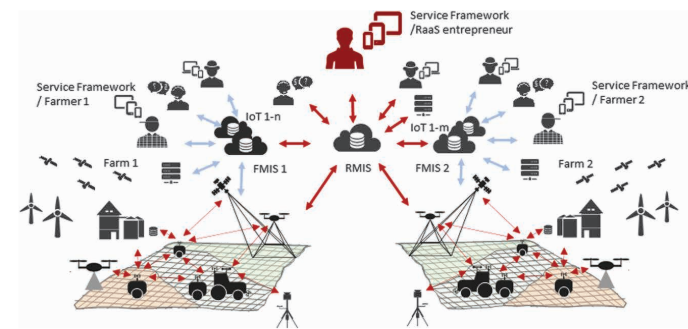
The increased scenario is faced by the robotic entrepreneur who presents RaaS for loads of farms. This arrangement that the RaaS machine must join with the many machines of the consumer, info sources and Farm Administration Recordsdata Systems (FMIS). This in total manner that the Robot entrepreneur’s Administration Recordsdata Machine (RMIS) ought to be in a design to join with ‘issues’ and products and services provided by varied manufacturers.
The resolve below illustrates the scenario field of this form of fancy scenario. The complexity is increased when the RaaS machine includes loads of robots working as a like a flash within the same farm operation.
The RaaS machine desires to join with other systems to communicate in loads of operational stages of farming systems, i.e.:
• farm tasks, which consist of from a farm or field viewpoint what assignment ought to
be accomplished, where and when;
• like a flash tasks, which existing the allocation of farm tasks to varied robots;
• robotic tasks, which maintain waypoints for navigation, mission parameters
and foremost actions; and
• detailed robotic tasks containing detailed directions for the robotic’s
actuators.
Wish to shield reading? Read the beefy chapter here.
- Focused on exploring the different chapters that characteristic in Advances in agri-meals robotics? Enter code BOOK20 at checkout by assignment of the BDS web website to redeem 20% off your aquire.
发布者:Daniel Carrillo-Zapata,转转请注明出处:https://robotalks.cn/advances-in-connectivity-and-distributed-intelligence-in-agricultural-robotics/