
Have you satisfied Atlas? Possibly not in “individual” yet probably you have actually viewed a video clip with insane robotics dance. Check it out if you have not ▶ Atlas can do a lot far more than dancing, which is among the reasons it was taken into consideration one of the most vibrant humanoid worldwide, due to its practically infinite activity.

Atlas was created by Boston Dynamics, a firm situated in Massachusetts. It was introduced in the year of 2013, yet its modern technology maintains being upgraded time after time, and nowadays it works as a research study system.
It was created to be able to run in the surface throughout all-natural catastrophes or human-provoked ones, encompassing a wide variety of situations like taking care of an atomic power plant throughout a disaster, or closing down a deep-water oil spill, to assisting to produce a raving fire.
Currently … The huge concern is:
What are the keys behind this humanoid?
Unfortunate information … Thousands! Yet do not stress, I will certainly go deep right into this write-up so you can be familiar with simply sufficient regarding this robotic. Atlas, certainly, is assembled with one of the most brilliant equipment and most recent software program sought after. In order to provide the robotic power and equilibrium so it can relocate with human-level dexterity, Atlas has an innovative control system and modern equipment.
Atlas’s advancement:
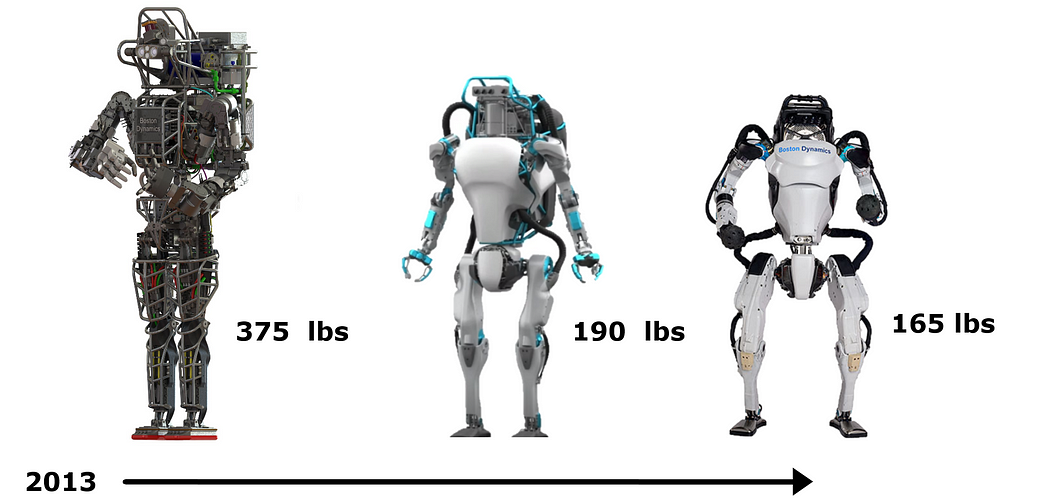
Because Atlas’s public launching, practically every little thing has actually been upgraded, from the tinniest screw to software program. And the style was one of the most noticeable function being transformed throughout the years.
Originally, Atlas was an action to the DARPA Robotics Obstacle (DRC), which is a reward competitors meant to hurry the growth of sophisticated robot equipment, software program, sensing units, and control user interfaces. All this, with the objective of having robotics aid human beings in a future all-natural and manufactured catastrophes. For this competitors Atlas was created to do these 8 jobs:
- Drive an energy automobile at the website.
- Traveling got down throughout the debris.
- Eliminate particles obstructing an entrance.
- Open up a door and go into a structure.
- Climb up a commercial ladder and pass through a commercial pathway.
- Make use of a device to appear a concrete panel.
- Find and shut a shutoff near a dripping pipeline.
- Link a fire hose pipe to a standpipe and activate a shutoff.
These jobs were finished efficiently, and such were agent of what could be experienced in catastrophe situations. By the year o 2015 to prepare for DRC’s finals, DARPA convoked Boston Characteristics to boost Atlas’ power effectiveness, button to onboard power and cordless interaction, reinforce its arm or legs, boost its longevity, and upgrade its look. And as you could understand currently, these enhancements were attained.

Odd it is to assume that Atlas went from opening up doors and shutoffs to dance and doing parkour. Yet that is since while they are constructing a robotic that can dance they are likewise constructing a structure for the future of robotics. To put it simply, they are developing a solid understanding of just how to regulate a wide variety of vibrant commands, yet extra significantly, it opened up room to construct an extensible software program system that will certainly be regularly creating as long as Atlas is accomplishing increasingly more objectives and jobs.
That is the reason it is called a research study system and not an industrial item, so the group programmer will certainly not quit up until Atlas has the ability to engage with its environments with human-level dexterity, and there the applications will certainly be infinite.
Atlas framework:
The robotic was created to run both outdoors and inside your home, yet its framework has a lot of specs to permit the robotic to dance, jump, and somersault. It was evaluated to perform at 1.5 m/s, determining 1.5 meters in elevation, and evaluating 75 kilos. Atlas has a whole-body vibrant harmonizing, and 3D printing components to conserve weight and room causing a portable robotic with a high strength-to-weight proportion and a huge work area.

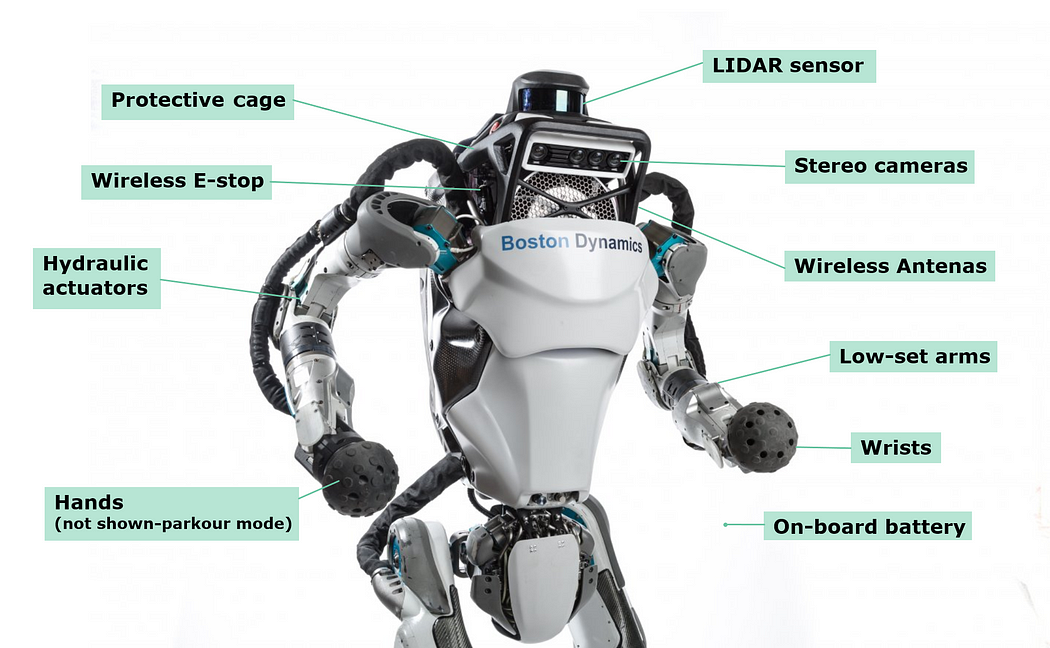
Atlas has the ability to feeling challenges and work out harsh surface autonomously or using teleoperation utilizing navigating sensing units. For that objective, Atlas has a collection of Stereo video cameras that makes it possible for eye deepness assumption and a picking up modern technology called LIDAR that determines range by brightening a target with a laser and assessing the shown light. To name a few sensing units, Atlas has the capability to adjust items in its atmosphere and traveling on harsh surface. To permit the transmission of sensing unit information and commands in between the robotic and the driver it makes use of cordless antennas. Weighting its haul as 11kg.
Its arm or legs are all powered by hydraulic actuators, 6 for each and every leg, 6 for each and every arm, 3 for the back joints, and 1 for the neck pitch. Atlas maintains its debt to the levels of flexibility (DOF) of its reduced collection of limbs. The wrists are functional to permit affixing various hands or devices and have actually an included level of flexibility for wrist turning to do jobs. On its head, it has a safety cage that guards breakable sensing units from loss damages.
The robotic is included with an onboard battery that powers the robotic with 480V, within a restricted time. It is provided with a cordless e-stop that permits to safelly run the robotic by making it possible for the driver to close it down with a press of a switch.
Atlas’s software program:
Atlas requires to have fast actions, vibrant mobility, and links in between assumption and control that permit the robotic to adjust on the fly, which is just feasible by having 2 computer systems running along it. Atlas has, as I stated, a cordless interaction web link that permits the robotic to send out sensing unit information to the driver, and the driver sends out commands to the robotic when the signal is solid. The driver in the control system is credited regulate concerns originating from the robotic sensing units and its commands. These commands are sent out from an onboard computer system, that runs fundamental features such as electric motor control and sensing units.
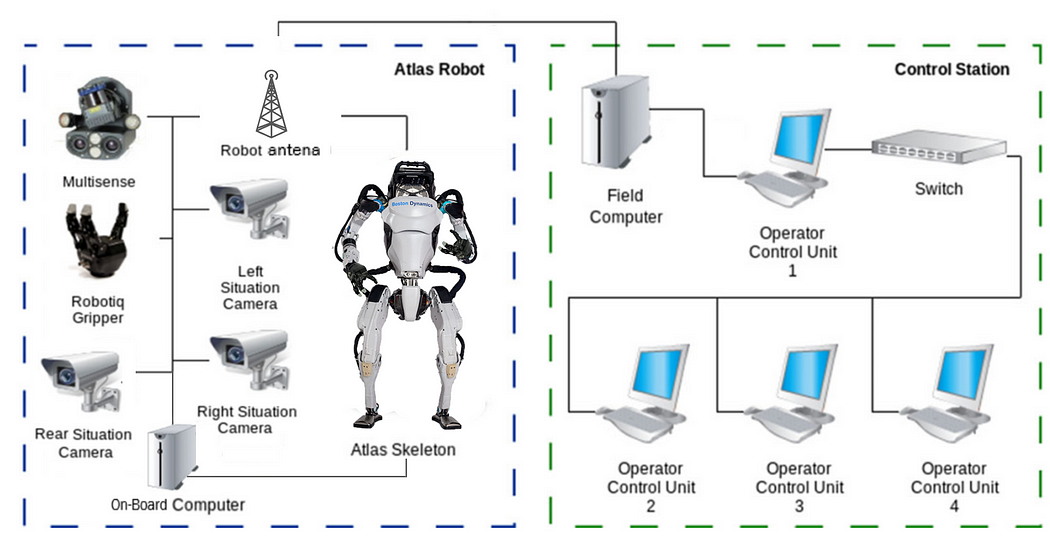
To create a robotic that can utilize the overall of its work area the robotic requires to have the onboard control terminal split right into 2 phases: a top-level controller that produces top-level control commands, and an additional one called a low-level control terminal that is in charge of developing the joints commands, this needs to take into consideration the kinematics and characteristics of the entire body.
The robotic relocates utilizing what is called inverted kinematics, which needs kinematic designs to give Atlas with certified movements and effectiveness to outside perturbations. This takes place in the software program by tight joint setting monitoring.
All this kinematics come close to takes place in 3 sub-stages:
1st– Understanding
Atlas is run by assumption formulas that are made use of to transform information from the sensing units to choose and intend its following actions. While it makes use of IMUs (verbalized placements and pressure sensing units to ideal control its body and really feel the ground to stabilize itself), it needs assumption to recognize and browse in the area with challenges, as you can see in:
With Atlas’ time-of-flight deepness cam the program creates factor clouds from its atmosphere at 15 structures per 2nd, which is a large collection of array dimensions. After that the assumption software program determines surface areas utilizing what is called a multi-plane division formula, this outcome is sustained by a mapping system that develops the various items that Atlas discovers.
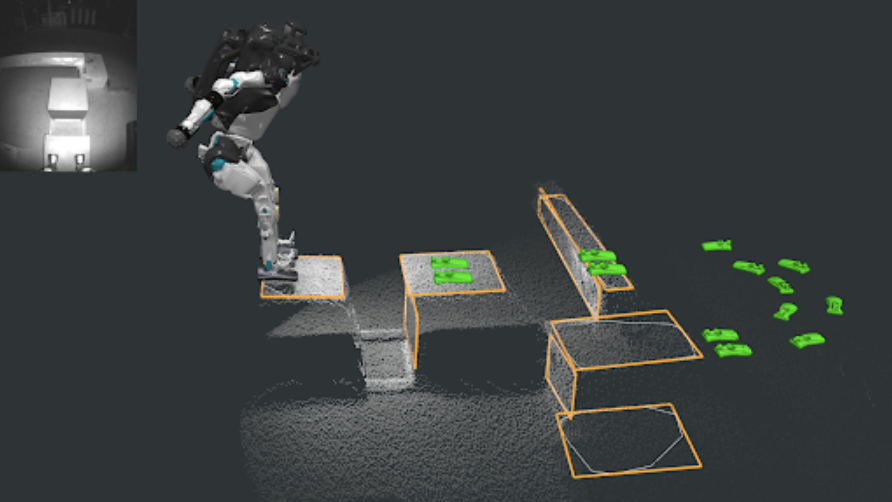
To do parkour is provided the robotic top-level maps that include where we desire the robotic to go and which balancings he should do along the road. Because the provided map is seldom 100% precise, it makes use of life-perception information to really feel the voids. As an example, Atlas can discover a box, also if it is relocated 0.5 meters sideways, yet certainly, if it is relocated as well much it will certainly not discover it and the system will certainly quit.
second– Actions collections
Each and every single relocation that we see Atlas doing is derivated from a pre-conceived design utilizing trajectory optimization. This collection operates as a storage space of motions that the robotic is proficient in, this ability can be upgraded each time it discovers a brand-new one. Making use of the information from the assumption phase the robotic picks the habits that best fit the targets as swiftly as feasible.
By predicting the habits offline utilizing this trajectory optimization it is feasible for the robotic to discover its restrictions and to simply put the code that would certainly be required to be run or else. The backflip was taken into consideration among the largest successes in the robotic development as a result of all the control included with the body and the arm or legs. In order to just utilize a basic controller they capitalize on this offline optimization.
third– Design anticipating control
Having the challenges and the actions efficiency selected, the obstacle after that is to really feel all the tinniest information so the robotic acts in a trustworthy method. Its controller, likewise referred to as MPC, makes use of a vibrant design to anticipate just how its motions will certainly advance in the future. This functions utilizing an optimization that computes the most effective relocate to do the most effective relocation feasible along the road.
As I defined above, each and every single design in its collection offers info to the controller on what is the most effective option, after that the controller readjusts things like pressure, pose, and timing to ideal take care of the ecological adjustments. This permits the robotic to not require formulas for all thousand type of circumstances feasible. As an example, leaping from a 52 centimeters box will certainly not be a lot various from a 40 centimeters box, since the MPC will certainly learn the information from the existing adjustments.
The MPC can likewise permit the robotic to ideal shift from a dive to a backflip, making the efficiency method smoother. Certainly, there are some restrictions determined in the program like transitioning from a backflip to a fast-forward running activity, yet as a whole, the designers located an equilibrium in between the intricacy of the controller and the dimension of the collection.
The honest side of humanoids growth
It is terrifying to assume that a person day humanoids could advance in a manner where they can capitalize on us and control the globe. Although this seems extremely sci-fi alike, it is an opportunity.
The fact is that modern technology was the manner in which human beings located to advance their culture, mindset, and globe. Yet those creations are, as we understand, absolutely nothing greater than a device for us to go even more right into the restrictions of inquisitiveness and way of living. Taking in this manner of reasoning, there will certainly not be any type of robotic superiority running the globe if we welcome that liberal. That modern technology is a device!
Atlas fits that meaning being a human catastrophe supply to interfere in the area. Several of the designers curious about the robotic think that this humanoid could also eventually have the ability to run amongst us to wage basic jobs, like caring for infirms, as an example. Once more, serving to the areas.
Boston Characteristics’ following actions with Atlas and its siblings
The most recent development was Atlas obtaining up on its pointers by itself, each time it dropped. That struck the group since dropping takes place a great deal of times. Yet that does not lead the group to irritation, in fact, as controls designer Sean Mason states, “For this group, enjoying the robotic stop working is among the most effective components. Every failing is viewed as a possibility to make the robotic much better and extra durable.”
The group is concentrated on developing formulas that can determine the physics intricacy to produce a wide variety of high-power and worked with actions. This way they will certainly have the ability to press the restrictions of a humanoid robotic, as Atlas, pressing ahead the development of software and hardware that all Boston Characteristics count on.
All the success over were incredible, yet it would certainly be a lot more unbelievable if eventually Atlas has the ability to calculate the behavior strategy completely in real-time utilizing numerous simultaneous preparation strategies, as opposed to utilizing offline optimizations as it does today.
Click to know more about the Atlas engineering team ▶
Recommendations
Atlas from Boston Dynamics overview;
How Boston dynamics makes Atlas run, flip, and vault;
Atlas robot in DARPA 2015 challenge;
Atlas’ leaps, bounds, and backflips;
Article about the human_in_the_loop_control software;
发布者:Dr.Durant,转转请注明出处:https://robotalks.cn/atlas-and-the-secrets-behind-the-most-dynamic-humanoid-in-the-world/