
Pay attention to this write-up


Fabricated muscle mass are powering a brand-new robot leg established by scientists at ETH Zurich and limit Planck Institute for Intelligent Solution (MPI-IS). Motivated by living animals, the robot leg hurdles various surfaces in an active and energy-efficient fashion.
As in human beings and pets, an extensor and a flexor muscular tissue make sure that the robotic leg can relocate both instructions. These electro-hydraulic actuators, which the scientists call HASELs, are connected to the skeletal system by ligaments.
The actuators are oil-filled plastic bags, comparable to those utilized to make ice. Concerning fifty percent of each bag is covered on either side with a black electrode made from a conductive product. Thomas Buchner, a doctoral pupil at ETH Zurich, clarified that “as quickly as we use a voltage to the electrodes, they are drawn in to every various other as a result of fixed electrical energy. In a similar way, when I massage a balloon versus my head, my hair stays with the balloon as a result of the very same fixed electrical energy.” As one enhances the voltage, the electrodes come better and press the oil guaranteed away, making the bag total much shorter.
Pairs of these actuators connected to a skeletal system lead to the very same combined muscular tissue motions as in living animals: as one muscular tissue reduces, its equivalent extends. The scientists utilize a computer system code that connects with high-voltage amplifiers to regulate which actuators agreement, and which prolong.
Much more effective than electrical motors
The scientists contrasted the power performance of their robotic leg keeping that of a traditional robot leg powered by an electrical motor. To name a few points, they assessed just how much power is needlessly exchanged warmth.
” On the infrared picture, it’s very easy to see that the mechanized leg eats far more power if, state, it needs to hold a curved setting,” Buchner claimed. The temperature level in the electro-hydraulic leg, on the other hand, continues to be the very same. This is due to the fact that the man-made muscular tissue is electrostatic. “It resembles the instance with the balloon and the hair, where the hair remains stayed with the balloon for fairly a long period of time,” Buchner included. “Generally, electrical motor driven robotics require warmth administration which needs extra warmth sinks or followers for diffusing the warmth to the air. Our system does not need them,” claimed Toshihiko Fukushima, a doctoral pupil at ETH Zurich.
 Register currently.
Register currently.
Robotic leg has active motion over unequal surface
The robot leg’s capacity to leap is based upon its capacity to raise its very own weight explosively. The scientists additionally revealed that the robot leg has a high level of versatility, which is specifically essential for soft robotics. Just if the bone and joint system has enough flexibility can it adjust flexibly to the surface concerned.
” It’s no various with living animals. If we can not flex our knees, for instance, strolling on an unequal surface area ends up being far more challenging,” claimed Robert Katzschmann, that started and runs the Soft Robotics Laboratory at ETH Zurich. “Simply think about taking an action down from the sidewalk onto the roadway.”
In comparison to electrical motors calling for sensing units to frequently inform what angle the robot leg goes to, the man-made muscular tissue adapts to appropriate setting via the communication with the atmosphere. This is driven simply by 2 input signals: one to flex the joint and one to prolong it.
” Adjusting to the surface is a crucial facet. When an individual lands after delving into the air, they do not need to believe beforehand regarding whether they must flex their knees at a 90-degree or a 70-degree angle,” Fukushima. The very same concept relates to the robot leg’s bone and joint system: upon touchdown, the leg joint adaptively relocates right into an appropriate angle depending upon whether the surface area is difficult or soft.
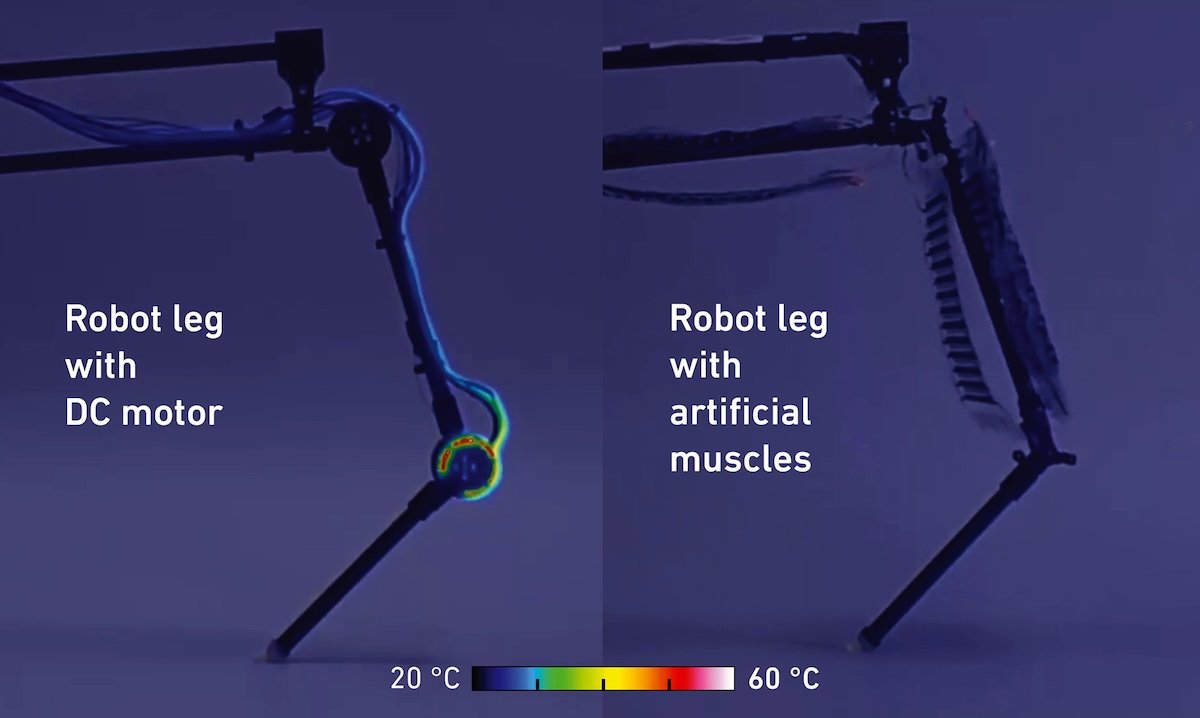
When robot legs need to hold a specific setting for a long period of time, a great deal of existing circulations via the DC electric motor that drives them (left). With time, power is shed in the kind of warmth. On the other hand, the man-made muscle mass (right), which deal with the concept of electrostatics and are effective, continue to be cool, due to the fact that no existing circulations via them under a continuous tons.|Debt: ETH Zurich and MPI-IS
Arising modern technology opens brand-new opportunities
The study area of electro-hydraulic actuators is still young, having actually arised just around 6 years earlier. “The area of robotics is making quick progression with innovative controls and artificial intelligence; on the other hand, there has actually been a lot less proceed with robot equipment, which is just as essential.”
Katzschmann included that electro-hydraulic actuators are not likely to be utilized in hefty equipment on building websites, however they do supply certain benefits over conventional electrical motors. This is specifically apparent in applications such as grippers, where the motions need to be very tailored depending upon whether the things being clutched is, for instance, a round, an egg or a tomato.
Katzschmann does have one appointment: “Contrasted to strolling robotics with electrical motors, our system is still restricted. The leg is presently connected to a pole, enters circles and can not yet relocate openly.”
Future job ought to conquer these constraints, unlocking to establishing actual strolling robotics with man-made muscle mass. He better clarifies: “If we integrate the robot leg in a quadruped robotic or a humanoid robotic with 2 legs, possibly someday, when it is battery-powered, we can release it as a rescue robotic.”
Editor’s Note: This write-up was republished from ETH Zurich.
.
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/eth-zurich-builds-robot-leg-powered-by-electro-hydraulic-actuators/