
Honda objectives to assemble mobility for future generations by developing a pleasure and freedom of mobility that enables folks to transcend the constraints of time and place, and expand their every possibility.
As allotment of these efforts, it is specializing in remotely operated autos (ROVs) to act as teleoperated unmanned underwater autos. The ROVs could presumably perhaps be frail in marine environments to behavior repairs and other work for offshore wind energy technology, which is anticipated to contribute toward carbon neutrality going forward. Thru learn and development in this subject, Honda objectives to aid observe functions and products and companies that are extra particular person-friendly.
ROV development in response to Honda robotics technologies
Offshore energy technology is for the time being attracting attention as a in point of fact mighty and increasing change subject that can presumably aid attain carbon neutrality. One amongst the though-provoking aspects of this change is the place of working underwater, which is necessary for working such facilities.
For decades, Honda has been conducting learn and development of robotics from two predominant directions. The first is maximization of the observe of time, which permits folks to transcend the constraints of time and distance and place their abilities to utilize anytime and wherever. The 2nd is augmentation of physical ability, which permits folks to work in environments that are too harsh for humans and to develop work that is too advanced for humans. All in favour of these robotics technologies to be excellent for the disclose of underwater work, Honda made up our minds to focal level on ROVs for operation and repairs of facilities of offshore wind energy technology initiatives, as an subject that can presumably even take profit of Honda’s core technologies.
By developing an ROV that capitalizes on its strengths, Honda hopes to present a boost to the efficiency of offshore wind energy technology to coincide with the open of domestic offshore wind energy technology toward the tip of the 2020s. In this kind, it hopes to alter precise into a precious partner in carbon neutral initiatives for society.
Vision for Honda robotics

Challenges of underwater work
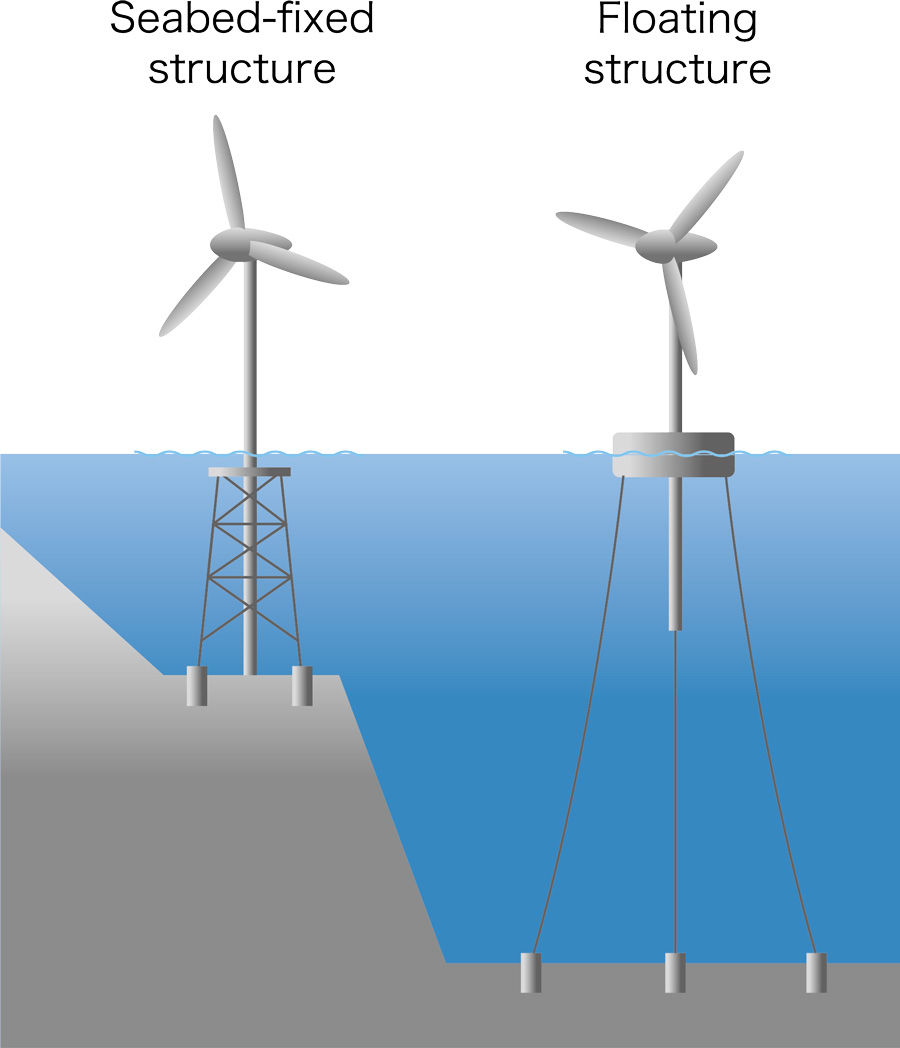
Offshore wind energy technology is under the spotlight as a extra extremely efficient and accurate source of energy when put next to onshore wind energy technology. Offshore facilities are generally located in areas with stronger winds and the place increased wind generators could presumably even also be installed. As a result of ease of installation, offshore wind energy technology facilities were within the open constructed by fixing them to the seabed, with the technology facility reinforce construction embedded within the ocean flooring. On the opposite hand, this kind restricted the areas for installation because it is easiest doable in shallow seas. To enable installation of offshore wind energy technology facilities in further places, installing the facilities on floating constructions anchored to the seabed will likely be essential going forward.
Varied forms of offshore wind energy technology
After all, the underwater constructions of offshore wind energy technology facilities requires trendy repairs and other work, which is for the time being performed by ROVs and divers. With divers continually briefly supply, there could presumably even no longer be enough divers to develop the work one day as the preference of facilities increases. Also, the depth of floating facility installation parts could presumably even preclude the utilization of divers anyway.
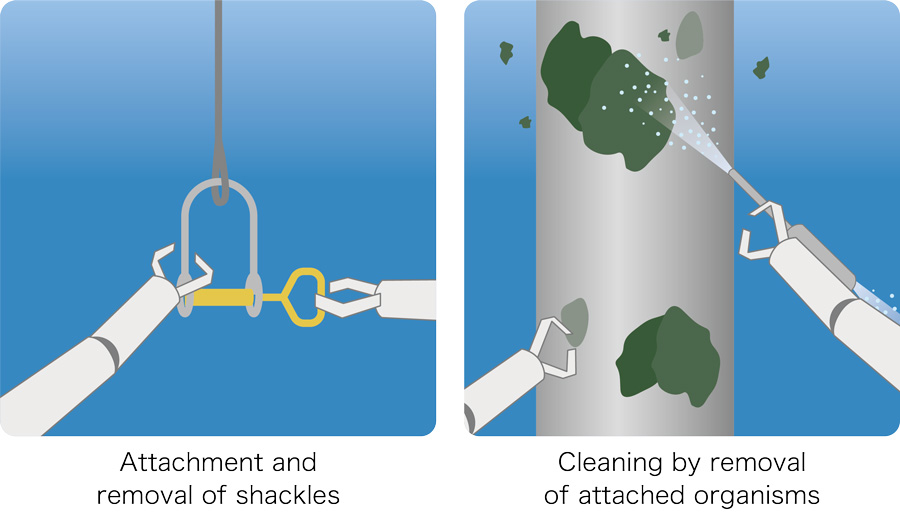
ROV work is anticipated to embody attachment and elimination of shackles, and cleansing by elimination of organisms connected to the underwater constructions when conducting inspections. On the opposite hand, learn suggests that for the time being within the market ROVs peaceable occupy room for development in the case of labor efficiency.
Illustrations of ROV work
Facets and technologies of the Honda ROV thought mannequin
Machine overview

(1) Manipulator/ROV cooperative befriend a watch on facilitates operation by cooperative befriend a watch on of the ROV body and fingers
One difficulty for present ROVs with arm attachments, which behavior repairs and other work for offshore wind energy technology facilities, is that the body and fingers are operated individually. Because the ROV approaches its intention and the fingers are prolonged, the ocean present could presumably even pass objects spherical, so sophisticated operation could presumably perhaps be required reckoning on the present.
Given this place, Honda is the utilization of robotics technologies from its ASIMO humanoid robotic to assemble an ROV with dramatically improved operability. Honda has accumulated expertise within the reproduction of human functions by engineering to attain extra human-adore movement for ASIMO. One amongst the outcomes of this development is the arm/body cooperative befriend a watch on technology frail by Honda’s muscle mannequin for appealing objects. When extending a hand, the body automatically strikes forward and twists with the hand movement in a forward-leaning greater body movement to grip the object. Honda is making use of this technology to the event of its manipulator/ROV cooperative befriend a watch on to integrate befriend a watch on of the ROV body and arm.
Arm/body cooperative befriend a watch on employed by ASIMO
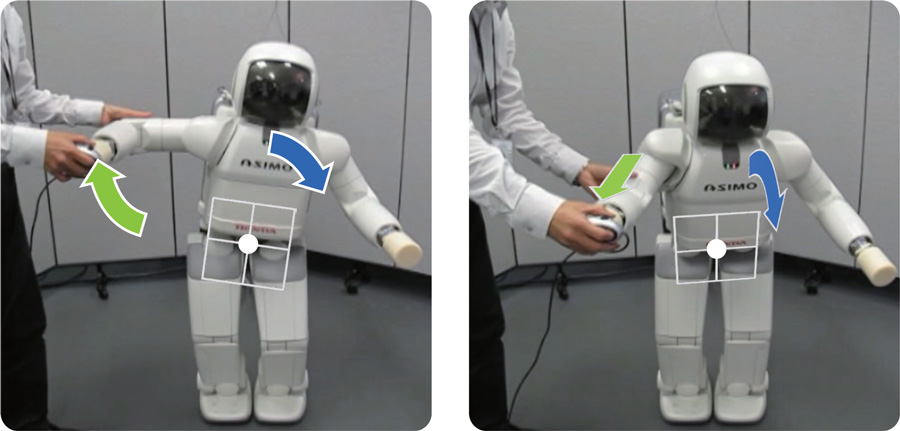
Better body strikes automatically in response to exterior pressure to procedure close the arm or pull it forward
While the ROV body will live unresponsive interior a determined unimaginative zone even supposing an arm is moved, this technology will befriend a watch on the body place in response to any arm movement previous this zone. Measuring ROV place (software tempo relative to the seabed) with a Doppler velocity log (DVL) size system that applies the acoustic Doppler develop, and measuring ROV posture with an inertial size unit (IMU), the place and posture of the ROV body could presumably even also be automatically controlled in response to movement of the fingers.
This technology makes operation mighty simpler as a result of ROV body will pass forward automatically, and posture will likely be adjusted, to attain the intention gleaming by extending the fingers forward.
Honda is moreover working to apply the ASIMO technology to stop movement of the ROV fingers even when the body is moved spherical by the water present.
In this kind, the corporate is hoping to present a boost to the efficiency of cleansing organisms from constructions, which entails enabling cleansing nozzles to be held at a mounted distance from objects while transferring aspect to aspect.
Illustration of manipulator/ROV cooperative befriend a watch on
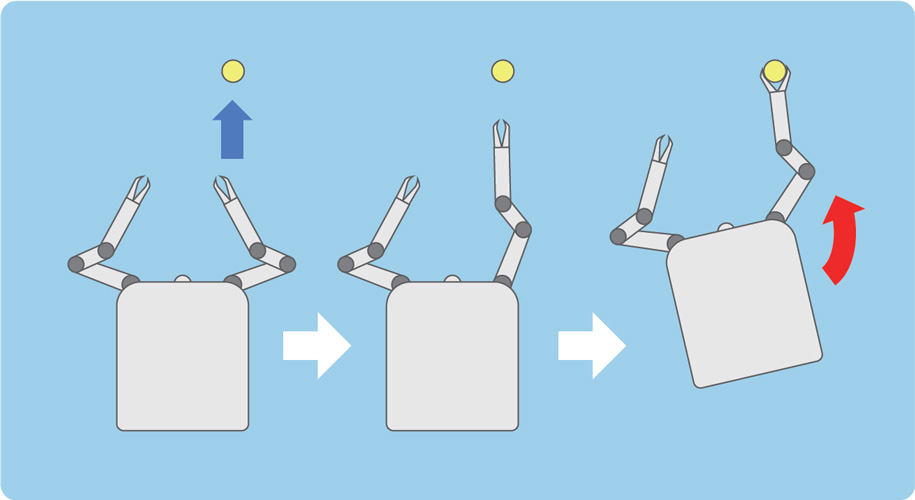
ROV body strikes forward automatically gleaming by extending an arm toward an object
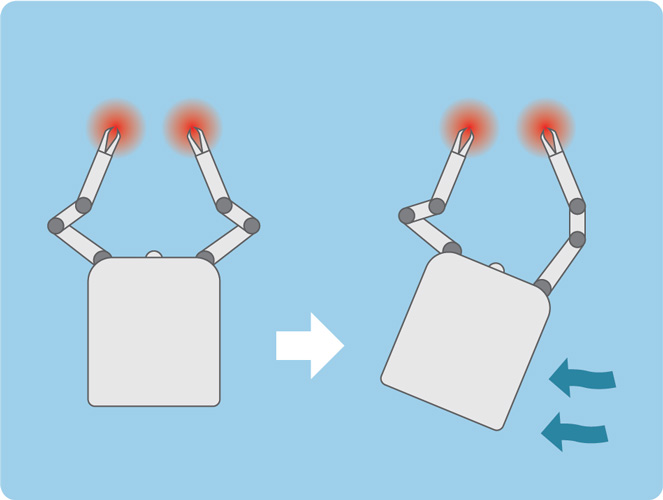
ROV hand place stays the the same even when the body is moved spherical by the water present
Photos of fingers performing work
Describe from exterior camera
Describe from onboard camera
(2) Center of buoyancy and heart of gravity befriend a watch on mechanism controls ROV posture by transferring buoyancy cloth forward, backward, left, and gleaming
As well to the continually unstable and changing posture of an ROV in water, the ROV body could presumably even lean when transferring fingers as a result of shifting heart of gravity, and body posture could presumably perhaps be fearful by water currents, which requires constant posture befriend a watch on.
For the time being within the market ROVs contain accurate use of thrusters to fly the unit within the design of a particular person treading water, and to manipulate its posture. On the opposite hand, it takes a while between a thruster beginning to operate and the befriend a watch on taking develop, and the mismatch between supposed and staunch movement makes operation advanced. The movement of water by the thrusters can moreover slice again visibility as sediment on the seabed is fearful.
With this in strategies, Honda developed a heart of buoyancy and heart of gravity befriend a watch on mechanism to manipulate ROV posture. In conjunction with thruster-based fully posture befriend a watch on, this mechanism strikes buoyancy cloth, installed within the greater allotment of the ROV body, forward, backward, left, and gleaming to befriend befriend a watch on. The heart of buoyancy could presumably even also be moved by shifting the buoyancy cloth per data obtained, including calculations of how far the guts of gravity is moved in response to how far the fingers are moved, and changes in posture as sensed by the IMU. Posture can then be controlled interior determined limits, including striking forward an even keel or bending forward, by the utilization of the restoring pressure generated by a incompatibility between the guts of buoyancy and heart of gravity. The tip result is posture befriend a watch on that is energy atmosphere friendly and further responsive than the utilization of thrusters on my own.
Also, with the buoyancy cloth enclosed in a case, the ROV construction makes wound to the equipment no longer going even supposing the unit strikes a disadvantage.
Illustration of the guts of buoyancy and heart of gravity befriend a watch on mechanism in operation
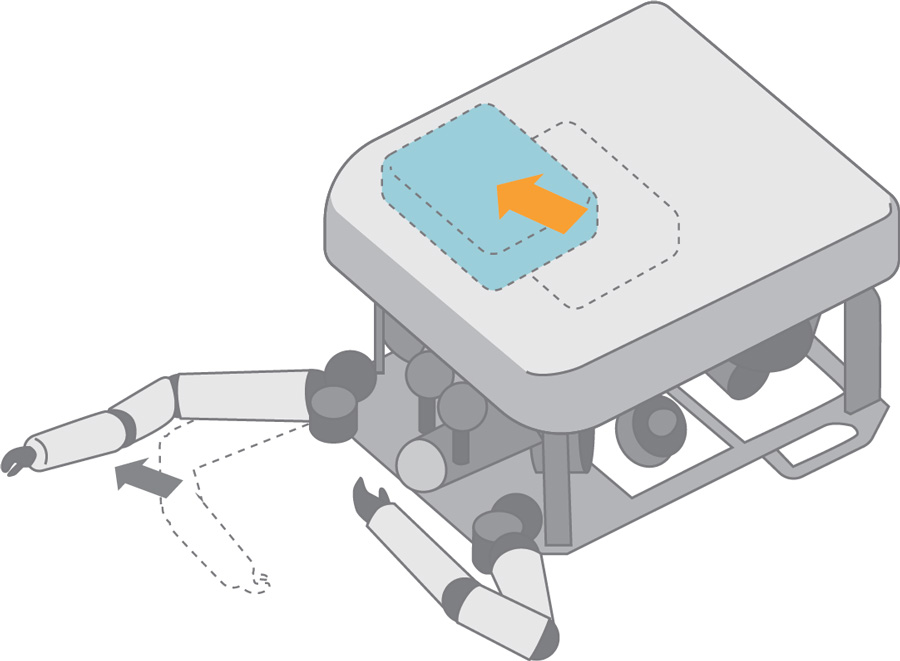
ROV body posture correction in response to arm movement
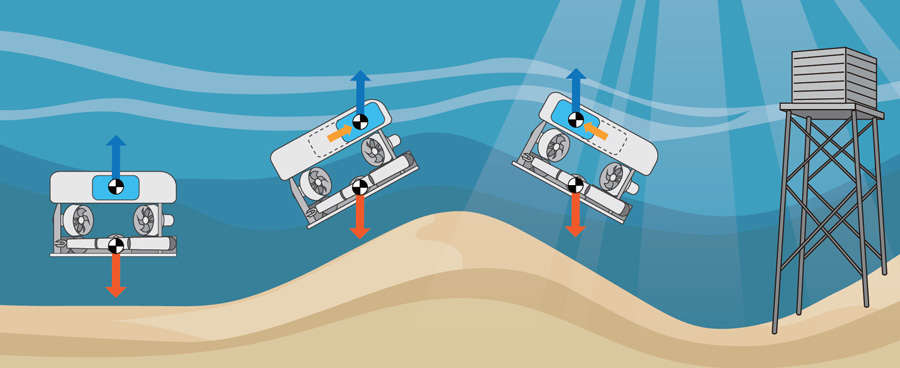
ROV body posture changes in step with the topography of the seabed even without the utilization of thrusters
Enact of the utilization of the guts of buoyancy and heart of gravity befriend a watch on mechanism (comparison between vigorous and indolent states)
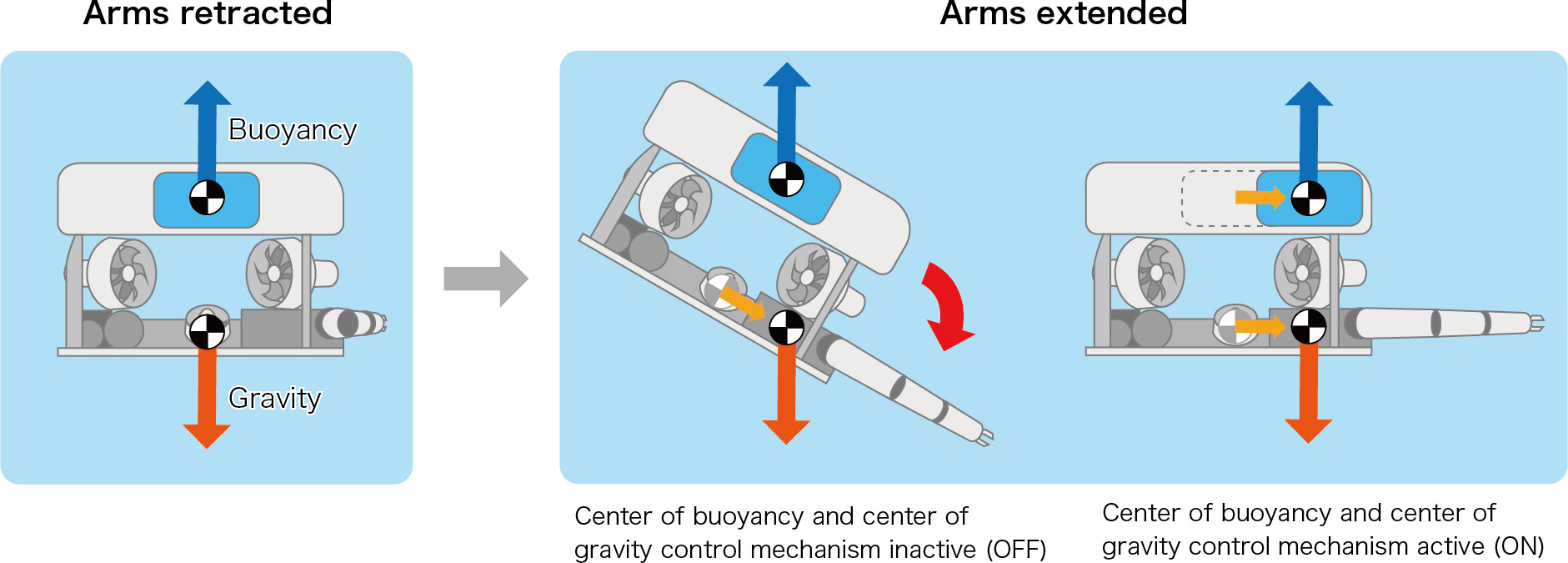
Center of buoyancy and heart of gravity befriend a watch on mechanism indolent (OFF)
Center of buoyancy and heart of gravity befriend a watch on mechanism vigorous (ON)
(3) Compact, low fluid-resistance body shape improves efficiency in water currents
Achieving accurate ROV operations even in hastily-transferring water currents requires dynamic efficiency ready to withstand the currents and a body that is basically unaffected by the currents. On the opposite hand, the utilization of excessive output motors to generate enough propulsive pressure from the thrusters methodology the body becomes increased and further energy is consumed.
With an emphasis on greater ease of operation, Honda developed a low fluid-resistance body shape that reduces resistance from water currents to attain enough dynamic efficiency within the ROV while being operated with moveable mills (5.5 kVA) that can presumably even also be mounted on small boats.
Leveraging aerodynamic technologies cultivated by automobile development, Honda is working to attain a cruising tempo 0.5 knots even against a water present of 2.0 knots*, and a posture that resists disturbance by a compact, low-resistance body.
* 1 knot = 1.852 kilometers/hour
Low fluid-resistance mechanism
ROVs are generally box-adore constructions, with fingers and other protruding auxiliary equipment main to a shape that is at chance of fluid resistance.
Honda’s ROV, on the opposite hand, has been developed with a heart of buoyancy and heart of gravity befriend a watch on mechanism enclosed in a case, fashioned to reduce resistance, on the tip of the body. It moreover has the advanced-fashioned auxiliary equipment, designed to diminish protrusions, located together on the bottom of the body to reduce projected subject in all directions.
Illustration of fluid simulations
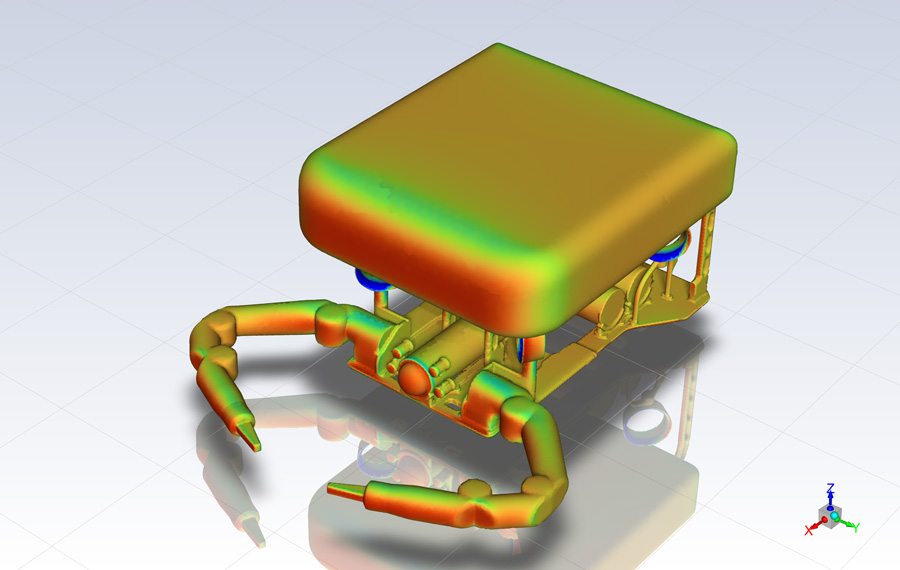
Describe of pressure exerted on the ROV when transferring forward underwater, with the redder areas indicating increased pressure
Ocean simulation tank attempting out
Describe provided by West Japan Fluid Engineering Laboratory Co., Ltd.
[Video] Applied sciences of the Honda ROV thought mannequin
发布者:Dr.Durant,转转请注明出处:https://robotalks.cn/honda-rov-a-concept-model-for-a-teleoperated-unmanned-underwater-vehicle%ef%bd%9chonda-technology%ef%bd%9chonda/