
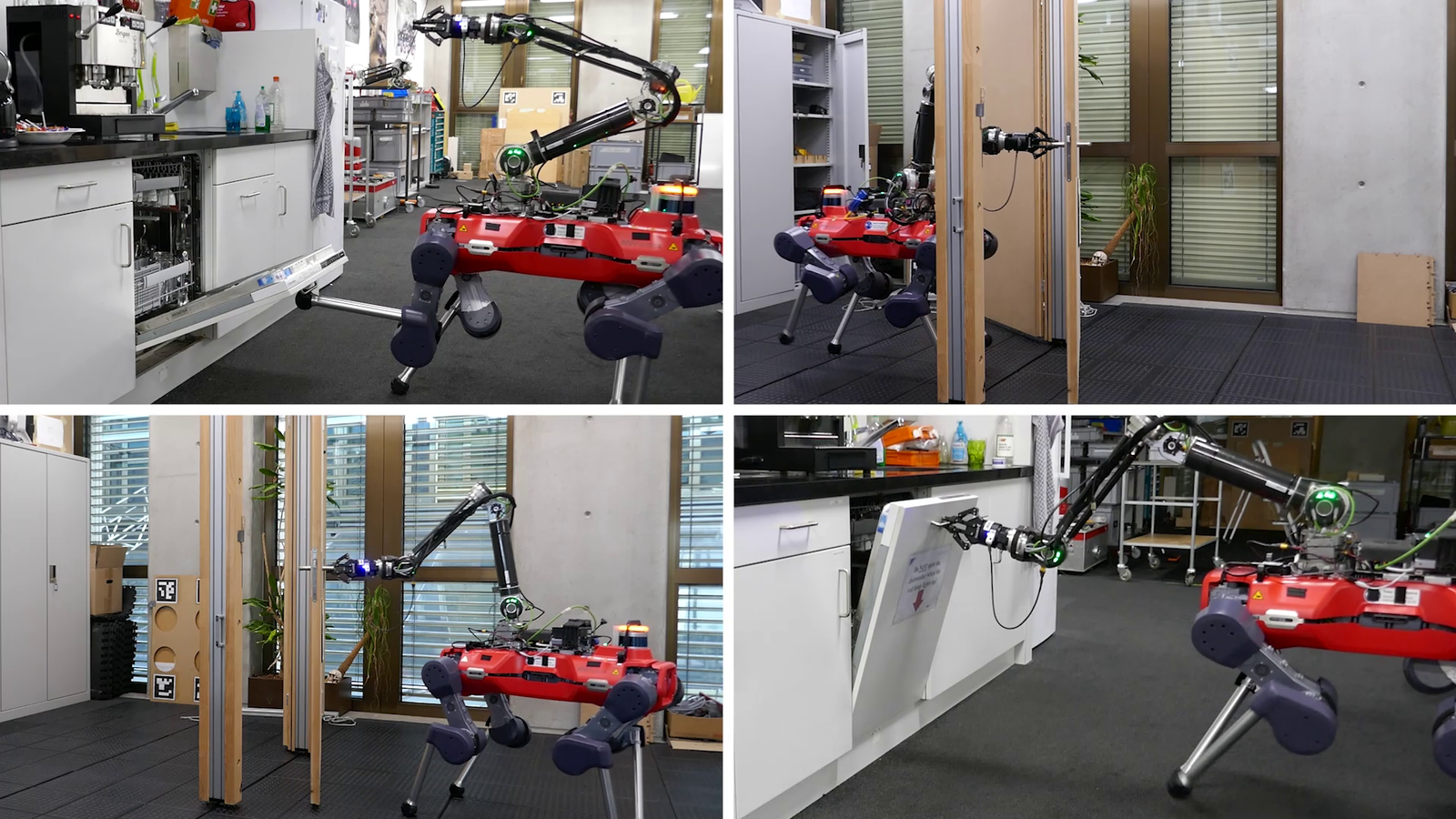

Photo from paper “Versatile multicontact planning and control for legged loco-manipulation“. © American Organization for the Innovation of Scientific Research
We had the possibility to talk to Jean Pierre Sleiman, writer of the paper “Flexible multicontact preparation and control for legged loco-manipulation”, lately released in Science Robotics.
What is the subject of the study in your paper?
The study subject concentrates on establishing a model-based preparation and control design that makes it possible for legged mobile manipulators to deal with varied loco-manipulation issues (i.e., control issues naturally entailing a mobility component). Our research particularly targeted jobs that would certainly call for several call communications to be resolved, instead of pick-and-place applications. To guarantee our technique is not restricted to simulation atmospheres, we used it to resolve real-world jobs with a legged system including the quadrupedal system ANYmal outfitted with DynaArm, a tailor-made 6-DoF robot arm.
Could you inform us concerning the effects of your study and why it is a fascinating location for research?
The study was driven by the wish to make such robotics, specifically legged mobile manipulators, with the ability of fixing a range of real-world jobs, such as going across doors, opening/closing dish washers, adjusting shutoffs in a commercial setup, etc. A basic technique would certainly have been to deal with each job independently and individually by committing a significant quantity of design initiative to handcraft the preferred habits:
This is commonly accomplished with making use of hard-coded state-machines in which the developer defines a series of sub-goals (e.g., understand the door manage, unlock to a wanted angle, hold the door with among the feet, relocate the arm to the opposite of the door, go through the door while shutting it, and so on). Additionally, a human specialist might show exactly how to resolve the job by teleoperating the robotic, tape-recording its activity, and having the robotic discover to resemble the tape-recorded actions.
Nevertheless, this procedure is extremely slow-moving, laborious, and vulnerable to engineering style mistakes. To prevent this concern for each brand-new job, the study went with an extra organized technique in the kind of a solitary coordinator that can immediately uncover the required habits for a variety of loco-manipulation jobs, without needing any type of comprehensive support for any one of them.
Could you clarify your approach?
The vital understanding underlying our approach was that every one of the loco-manipulation jobs that we intended to resolve can be designed as Job and Activity Preparation (TAMP) issues. TAMP is a reputable structure that has actually been mainly utilized to resolve consecutive control issues where the robotic currently has a collection of primitive abilities (e.g., choose things, location things, relocate to object, toss things, and so on), yet still needs to effectively incorporate them to resolve even more intricate long-horizon jobs.
This point of view allowed us to design a solitary bi-level optimization formula that can include all our jobs, and manipulate domain-specific understanding, instead of task-specific understanding. By incorporating this with the reputable toughness of various preparation methods (trajectory optimization, educated chart search, and sampling-based preparation), we had the ability to accomplish an efficient search method that addresses the optimization issue.
The primary technological uniqueness in our job depends on the Offline Multi-Contact Preparation Component, shown in Component B of Number 1 in the paper. Its total arrangement can be summed up as adheres to: Beginning with a user-defined collection of robotic end-effectors (e.g., front left foot, front ideal foot, gripper, and so on) and things affordances (these define where the robotic can connect with the things), a distinct state that catches the mix of all call pairings is presented. Offered a begin and objective state (e.g., the robotic ought to wind up behind the door), the multi-contact coordinator after that addresses a single-query issue by incrementally expanding a tree using a bi-level search over practical call settings collectively with continual robot-object trajectories. The resulting strategy is boosted with a solitary long-horizon trajectory optimization over the found call series.
What were your primary searchings for?
We located that our preparation structure had the ability to swiftly uncover intricate multi- call prepare for varied loco-manipulation jobs, in spite of having actually offered it with very little support. As an example, for the door-traversal situation, we define the door affordances (i.e., the manage, back surface area, and front surface area), and just give a thin purpose by just asking the robotic to wind up behind the door. In addition, we located that the created habits are literally constant and can be accurately performed with an actual legged mobile manipulator.
What even more function are you preparing around?
We see the here and now structure as a tipping rock towards establishing a completely independent loco-manipulation pipe. Nevertheless, we see some restrictions that we intend to resolve in future job. These restrictions are mainly attached to the task-execution stage, where monitoring habits created on the basis of pre-modeled atmospheres is just sensible under the presumption of a sensibly exact summary, which is not constantly simple to specify.
Toughness to modeling inequalities can be significantly boosted by enhancing our coordinator with data-driven methods, such as deep support discovering (DRL). So one intriguing instructions for future job would certainly be to direct the training of a durable DRL plan utilizing reputable specialist presentations that can be swiftly created by our loco-manipulation coordinator to resolve a collection of difficult jobs with very little reward-engineering.
Concerning the writer
|
|
Jean-Pierre Sleiman obtained the B.E. level in mechanical design from the American College of Beirut (AUB), Lebanon, in 2016, and the M.S. level in automation and control from Politecnico Di Milano, Italy, in 2018. He is presently a Ph.D. prospect at the Robotic Equipments Laboratory (RSL), ETH Zurich, Switzerland. His present study rate of interests consist of optimization-based preparation and control for legged mobile control. |

发布者:Daniel Carrillo-Zapata,转转请注明出处:https://robotalks.cn/interview-with-jean-pierre-sleiman-author-of-the-paper-versatile-multicontact-planning-and-control-for-legged-loco-manipulation-2/