
Pay attention to this write-up



A Relay robotic makes a resort shipment making use of independent navigating. Resource: Relay Robotics
When we think about independent navigating, the very first point that generally enters your mind is self-driving cars and trucks. Although their growth has actually extended years, current years have actually seen considerable developments.
One essential structure that is made use of everywhere in the self-driving vehicle market is the category of degrees of driving automation. Specified by the Culture of Automotive Engineers (SAE) in 2014, this structure continues to be a typical recommendation in the area.
While interior mobile robotics have actually appreciated no place near the popularity that self-driving cars and trucks have, they have actually advanced significantly in the previous years too. Driven by personnel lacks, solution robotics are progressively being released throughout different markets, consisting of friendliness, medical care, storage facility and logistics, food solution, and cleansing.
Relay robotics specifically, are being released in active medical facilities and resorts throughout the globe. Nonetheless, unlike automated driving, there is presently no extensively taken on criterion for degrees of independent navigating for interior robotics. Our purpose is to offer such a structure.
Offered the fundamental accessibility of a human motorist as backup in self-driving cars and trucks, a lot of the SAE structure is based upon the circulation of driving obligations in between the human motorist and the self-driving representative. Degree 0 shows no automation where the human motorist is entirely in control.
Degrees 1, 2, and 3 have differing levels of partial automation. At Degree 4, the automobile is completely self-driving, yet just under specific specified problems. Leading self-driving business like Waymo have actually accomplished this degree of freedom.
Ultimately, Degree 5 is complete automation all over and in all problems. This degree has actually not been accomplished yet.
What affects degrees of independent navigating for interior robotics?
Installment intricacy
Interior robotics do not have a fundamental collaboration with a human motorist. Basically, they start at Degree 4 of the SAE structure hereof. Yet interior robotics do have a various benefit, an additional prop to depend on rather at preliminary degrees of freedom– the capability to customize their atmosphere.
For instance, customizing a structure’s framework by paint lines on the flooring or putting spots on the wall surfaces is not as challenging about customizing all roadway framework. Such pens can be really valuable help for computerized led automobile (AGV) navigating.
As a whole, interior robotics today undergo a setup procedure prior to being taken into procedure. Along with customizing structure framework, mapping, labeling, and various other needed arrangement can be a component of this procedure. This can usually be expense-, time-, and labor-intensive.
The even more progressed the navigating abilities of the robotic however, the much less challenging the setup procedure has a tendency to be. And reduced setup intricacy causes decrease expense and rubbing for fostering.
Installment intricacy is hence a crucial aspect to think about while specifying the degrees of independent navigating for interior robotics.

Mobile robotic factors to consider consist of security and effectiveness in vibrant setups like medical facilities. Resource: Relay Robotics
Social navigating
One more significant difference in between self-driving cars and trucks and interior independent robotics is obviously the distinction in settings. With the exemption of factory-like settings, the majority of interior settings are really disorganized. There are no lanes or signals, no specialized crosswalks for individuals, and no well specified customary practices.
Rather, interior settings are extremely social rooms. Robotics need to co-navigate with all various other representatives, human and robotic, that are likewise making use of the room. Distinct customary practices are changed by a freely specified collection of social guidelines that alter based upon nation, atmosphere, circumstance and several various other variables. As an example, do robotics, individuals, or various other lorries hand down the left or the right?
Efficiently browsing in these extremely disorganized and social settings needs abilities and actions that are generally positioned under the tag “social navigating.” At a high degree, social navigating is a collection of actions that permits a robotic to browse in human-populated settings in a manner that protects or perhaps boosts the experience of the human beings around it.
While useful navigating concentrates on security and effectiveness, leading to robotics that can finish a job yet usually require human beings to adjust to them, social navigating concentrates on the top quality of human experience and permits robotics to adjust to human beings. This might not be critical for regulated, human-sparse settings like manufacturing facilities and stockrooms yet ends up being progressively essential for disorganized, human-populated settings.
Functional domain name aids specify independent navigating
A robotic’s functional domain name is the sort of settings it can be effective in. Not all interior settings coincide. Various settings have various demands and may need various degrees of navigating elegance.
As an example, stockrooms and manufacturing facilities enable robotics with easier, security concentrated navigating to be effective. On the various other hand, settings like resorts or dining establishments are disorganized, unforeseeable and need greater degrees of navigating ability, especially social navigating. Much more difficult are extremely crowded settings or delicate settings like medical facilities and senior treatment homes.
Not every interior atmosphere needs a robotic of the highest possible social navigating degree, yet putting a robotic with reduced social navigating ability in settings like medical facilities can cause inadequate efficiency. So it is very important to specify the functional domain name of a robotic.
Multi-floor independent navigating
Self-driving cars and trucks require just stress over single-level roadways. Yet a a great deal of structures on the planet are multi-floor, and robotics require to be able to pass through those floorings to be efficient. Conquering this difficulty of upright navigating can cause a massive rise in a robotic’s functional domain name and is a crucial aspect to think about when specifying a robotic’s degree.
So setup intricacy, social navigating, and functional domain name are the 3 measures versus which we can gauge the degree of independent navigating for interior robotics.
Multi-floor navigating, while widely essential, is rather orthogonal to 2D navigating ability and robotics of every navigating degree can possibly access it. So we produce a degree modifier for this ability that can be included in any kind of degree.
Keeping that, allow’s study specifying degrees of interior robotic navigating.
Degree 0
These are robotics that have no independent navigating capacities and depend completely on human beings to run them. Robotics that come under this group are telepresence robotics and remote regulated robotics like remote-controlled cars and trucks.
Degree 1
Robotics that have a very little sensing unit collection and can just browse on courses that are predefined making use of physical systems like cables hidden in the flooring, magnetic tape or paint. These Degree 1 robotics have no capability to leave these predefined courses.
Such AGVs have no idea of area, making use of just the range followed the course to choose. They can generally identify barriers and decrease or pick up them, yet they do not have the capability to prevent barriers.

A Computer mouse AGC 3A10-20T automated led cart. Resource: Toyota
Degree 1 robotics require substantial modifications to a structure’s framework throughout setup causing considerable expense. They have virtually no social navigating ability, therefore their functional domain name is mostly extremely structured and managed production and logistics settings.

Degree 1 qualities. Resource: Relay Robotics
Degree 2
Robotics running at Degree 2 are AGVs that do not require physical course interpretation yet still depend on courses that are electronically specified throughout setup. These mobile robotics can center themselves within a website making use of exterior help such as reflectors, fiducials or signs that are positioned in critical areas at the website. They can utilize this area to adhere to the essentially specified courses.
Like Degree 1 robotics, these robotics likewise can not leave their digital predefined courses and can just identify and pick up barriers yet can not prevent them.

Demo of an AGV triangulating making use of reflectors on wall surfaces. Resource: Cisco-Eagle
Although the framework modifications needed are not as invasive as Degree 1, as a result of the requirement for setup of exterior localization resources, these robotics have modest intricacy of setup. The repaired courses suggest that they have reduced social navigating ability and are still best made use of in fairly organized settings with little to no communication with human beings.

Degree 2 independent navigating qualities. Resource: Relay Robotics
Degree 3
Robotics running at Degree 3 depend completely on onboard sensing units for navigating. They make use of lidars and/or cams to develop a map of their atmosphere and center themselves within it. Utilizing this map, they can intend their very own courses with the website. They can likewise dynamically alter their course if they identify barriers on it. So they can not just identify barriers, yet can likewise prevent them.
This self-reliance and versatility of Degree 3 robotics causes modest social navigating abilities and considerably minimized setup intricacy because no framework modifications are needed.
Degree 3 robotics can be made use of in disorganized settings where they can browse along with human beings. They stand for a substantial rise in knowledge, and systems of this degree and greater are called independent mobile robotics (AMRs). The majority of modern-day solution robotics come from this group.

Degree 3 independent navigating qualities. Resource: Relay Robotics
Degree 4
Despite the fact that robotics of Degree 3 go across the limit of browsing in disorganized settings along with human beings, they still browse with modest social navigating ability. They do not have actually the progressed social navigating abilities required to adjust to all human communication situations with elegance. This often needs the human beings it engages with to make up for its behavior constraints.
On the other hand, Degree 4 robotics are AMRs with social navigating abilities advanced sufficient to be on the same level with human beings. They can capably browse in any kind of interior atmosphere in any kind of circumstance given there aren’t any kind of physical constraints.
This suggests that their functional domain name can consist of all interior settings. One more implication of this is that Degree 4 robotics ought to never ever require human treatment to browse.
This degree has actually not yet been completely accomplished, and specifying and examining whatever that is needed for such advanced social navigating is difficult and continues to be an energetic location of research study. Below is an infographic from a current effort to catch all the aspects of social navigating:
To browse capably in all interior settings, robotics require to be able to maximize within a complicated, obscured, and regularly altering collection of guidelines. This is something that human beings deal with easily and usually without mindful idea, yet that simplicity hides a great deal of intricacy. Below are a couple of difficulties that lie on the course to attaining human-level social navigating–
- Proxemics: Everyone has a room around them that is taken into consideration individual room. Attacking that room can make them awkward, and robotics require to appreciate that while browsing. Nonetheless, the shapes and size of this room bubble can differ based upon society, atmosphere, circumstance, group thickness, age, sex, and so on. For instance, an individual with a pedestrian may require a larger-than-average room bubble around them for convenience, yet this room needs to reduce substantially when taking a lift. Defining guidelines for every single circumstance can swiftly come to be unbending.
- Shared sources: Making use of doors, lifts, and various other common sources in a structure have their very own implied collection of guidelines. Navigating patterns that hold for the remainder of the structure may not use right here. On top of that, robotics require to adhere to specific social standards while making use of these sources. Opening up doors for others is taken into consideration respectful. Awaiting individuals to leave a lift prior to attempting to go into, making room for individuals attempting to leave a jampacked lift, or perhaps briefly leaving the lift completely to make room for individuals to departure prevail politeness that robotics require to observe.
- Interacting intent: Robotics require to be able to interact their intent while co-navigating with various other representatives. Refraining so can often produce unpredictability and complication. Human beings do this with body movement, eye call, or spoken interaction. We depend on this especially when we discover ourselves in predicament scenarios like strolling towards an additional individual in a slim hallway or when coming close to the very same door at the very same time. Robotics likewise require to be able to fix scenarios like these while protecting the security and convenience of the human beings they’re engaging with.
Altogether, attaining this degree of social navigating is exceptionally difficult. While some Degree 3 robotics might have partly addressed several of these issues, there is still fairly a methods to visit get to real Degree 4 freedom.

Degree 4 interior navigating qualities. Resource: Relay Robotics
Degree 5
As human beings, we have the ability to discover our means also in brand-new, strange structures by relying upon signs, making use of semantic understanding, and by requesting instructions when required. Robotics today can refrain from doing this. At the minimum, the website requires to be completely mapped throughout setup.

Degree 5 independent interior navigating of a solution robotic. Resource: Relay Robotics, produced with Google Gemini
Degree 5 robotics are robotics that can browse in all interior settings on the same level with human ability, along with do so in an entirely brand-new atmosphere without in-depth prebuilt maps and a by hand extensive setup procedure. This would certainly get rid of setup intricacy completely, enabling robotics to be functional in brand-new settings instantaneously, lowering rubbing for fostering, and leading the way for robotics to come to be much more extensive.
This is an absent degree in the structure for self-driving cars and trucks as they likewise undergo a comparable procedure where high accuracy 3D maps of a location are produced and annotated prior to a self-driving vehicle can run in it. Advancements in expert system can aid recognize Degree 5 ability.
Degree 5 mobile robotic navigating qualities. Resource: Relay Robotics
Multi-floor independent navigating+
Robotics that can either climb up stairways or that can call, board, and leave lifts open the capability to do multi-floor navigating and obtain the “plus” classification. Likewise, extremely reputable sensing units are needed to identify and prevent security threats like stairs and escalators for any kind of robotic that runs in multi-floor structures. So a Degree 2 robotic that can effectively ride lifts would certainly be assigned Degree 2+.
Lift riding is the much more usual of both strategies to this ability and might need framework modifications to the lift system to attain. So this presents extra setup intricacy.
It is likewise worth keeping in mind that in human-populated settings, lifts offer robotics an added social navigating difficulty. This is since it needs motion in a restricted room with several various other representatives, limited time restrictions for lift access and departure, and taking care of unique behavior patterns that human beings participate in while riding lifts.
In recap, robotics of Degrees 1 and 2 depend greatly on framework modifications for navigating and have reduced social navigating, so they are best matched for organized, human-sparse settings.
Robotics of Degree 3 are much more smart and autonomous. They need virtually no framework modifications throughout setup, yet at minimum they need the atmosphere to be mapped and identified. They have modest social navigating abilities and can run in disorganized, human-populated settings.
Degree 4 stands for an improvement to human-level navigating ability permitting secure implementation in any kind of interior atmosphere. Degree 5 robotics take this an action better, browsing with the very same efficiency also in completely brand-new, strange rooms. Any one of these robotics that can do multi-floor navigating obtain the extra “+” classification.
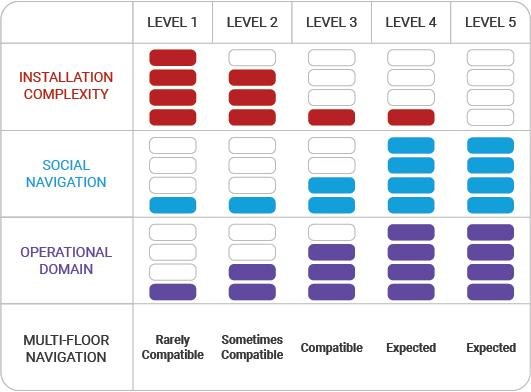
Trends throughout degrees. All infographics produced by Irina Kim and Jason Hu, Relay Robotics
Self-governing navigating should be reputable
A vital aspect for success that is not stood for in this structure is the general toughness and integrity of the item. It is very easy to ignore the intricacy and changability of real-world settings. Robot systems generally take a number of years of area experience to go from a great laboratory presentation to a durable and reputable item that individuals can depend on.
For instance, Relay Robotics supplies Degree 3+ robotics that have actually currently finished over 1.5 million effective distributions and built up years of real-world functional experience. With this fully grown innovation as a structure, the firm is making strides towards Degree 4+ navigating.
Relay’s concentrate on developing advanced social navigating that can deal with also active and demanding settings like healthcare facility emergency situation divisions has actually made our AMRs amongst one of the most advanced on the marketplace today. For the Relay and the wider market, the secret to progressing more depend on boosting social navigating capacities.
Although there is still much job to do, Relay Robotics is making use of advancements in AI and deep understanding to arrive.
Regarding the writers
Sonali Deshpande is elderly navigating designer at Relay Robotics. Before that, she was a robotics software application designer at Mayfield Robotics, an understanding systems designer at General Motors, and a robotics designer at Exploration Robotics.
Deshpande has a master’s in robot systems growth from Carnegie Mellon College.
Jim Slater is a robotic systems designer and participant of the executive personnel at Relay Robotics, functioning as a specialist. Before that, he was the owner and chief executive officer of 2 effective start-ups consisting of Nomadic Technologies (mobile robotics) and Alliant Networks (cordless networks).
Slater has his master’s in design from Stanford College, where he was a study aide in the Computer technology Robotics laboratory. He likewise holds an MBA from the College of Wisconsin– Madison.
The writers likewise say thanks to Steve Relatives for his understanding and responses in developing this item. This write-up is published with authorization.
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/relay-robotics-proposes-levels-of-autonomous-navigation-for-indoor-robots/