
Pay attention to this post



The PPE component evaluated by gantry robotic perseverance the Portal spaceport station. Resource: Bell-Everman
NASA’s Artemis Program intends to send out human beings back to the moon to develop a lunar ground base and spaceport station. Called Portal, the spaceport station will certainly be powered by the Power and Propulsion Component, or PPE, component, which utilizes huge ranges of sophisticated, multi-junction solar batteries to create 60 kilowatts of power.
To make certain the PPE’s success, it’s vital to evaluate the solar ranges with sophisticated simulation that duplicates sunshine and steps each circuit’s efficiency. Engineered by Angstrom Layouts Inc., the solar simulator heads need to be placed at many factors along the size and size of the solar ranges.
That procedure that is normally completed making use of automation frameworks that contain direct movement phases. Due to the fact that the PPE’s solar ranges are so huge, typical frameworks developed for traditional range dimensions can not supply the needed upright and straight movement.
Bell-Everman made, crafted and made a personalized movement system that allows the Angstrom Layouts solar simulator heads to evaluate the PPE’s photovoltaic panels. And to make certain that the simulator heads are totally adjusted, we additionally developed the I-formation gantry robotic that adjusts and verifies the simulator efficiency versus solar battery criteria.
Right here’s a deep study the mechanical difficulties of fulfilling the movement system’s unique needs.
Bell-Everman discovers one of the most economical layout
A very early layout included 2 flexing tracks– one on the ground and the various other about 30 ft. high near the top of the panels. The tracks would certainly sustain the LED solar simulators– a 3,500-lb. lots– enabling them to evaluate one released range, after that walk around the bend and examination a variety beyond of a large scaffold framework.
However this remedy, which would certainly run like an I-formation gantry, needed specialized birthing systems. This boosted layout intricacy and promptly drove the task past budget plan, offered the elevation and lots needs.
As an alternate layout, Bell-Everman crafted a movement system that utilizes a mobile base for X and Y activities, and a servo-controlled Z to increase the solar simulators up a three-story high upright tower. This mobile-robot gantry layout was one of the most economical alternative and substantially decreased system intricacy.
 Register currently.
Register currently.
Framework, movement system need to remain upright
Because of the solar simulator haul, the whole structure of the mobile-robot gantry needed to birth a great deal of weight and maintain the simulator LED ranges alongside the solar range. This needed a considerable quantity of limited component evaluation to make certain the subframe can endure the pressures of lifting the lots– and endure a seismic occasion without falling over.
Likewise, the totally created movement system is huge and need to have the ability to make a reverse completion of an implementation framework in an extremely limited layout.
Initially developed to evaluate the PPE’s panels, NASA can remain to make use of the movement system to evaluate future space-going innovations.
Hefty cantilevered training manages pressures
The 240 solar simulator heads are embedded in a pantographic morphing range in 3 well balanced rotating sectors, which shifts in between 2 setups: a 2-by-18-ft. grid and a 6-by-6-ft. grid. As the range actuates, it conveys high minute pressures on the movement system’s structure.

The PPE solar simulator structure’s pantographic changing range of 3 well balanced rotating sectors residences embedded pLEDss heads outdoors ports. Resource: Bell-Everman
To suit these pressures, we made use of heavier-than-usual direct bearing rails and went across roller bearings with an 8-in. birthed to pass Ethernet interaction and 40 kW of electric power per section.
The range and changing framework stand for a 3,500-lb. cantilevered lots on the upright tower, needing a counterbalance to both equilibrium minute lots on the tower and supply something near neutral buoyancy.
Gross motion of the mixed haul and LED range is supplied by a 10,000-lb. drum hoist. To accomplish upright movement, a solitary ServoBelt Heavy Linear is made use of with Bosch Rexroth drives and huge repetitive cords.
The counterbalance layout makes certain that the upright drive just sees a weight discrepancy of 50 to 300 pound.– ample breathing space for the ServoBelt Heavy LoopTrack drive, which can suit as much as 600 pound. of direct pressure.
Likewise, many thanks to the counterbalance, any kind of drive failing would certainly not lead to dropping this important lots. Threading these cords with sheave reroutes allows the weight and haul to be elevated with each other to their mid-height from a parked placement near the bottom.
This intriguing and totally repetitive wire format enables complete neutral buoyancy throughout the variety of the rugged placing hoist.
Tower created item by item
The upright tower sustaining the solar simulator lots will certainly get to 3 tales high when totally created. Due to the fact that it was as well high to fit inside the structure where it was made, the tower was integrated in 3 items.
We made a much shorter counterbalance wire readied to permit the lower area to be made use of for complete practical screening within the reduced ceiling of our setting up bay.
As the lift takes a trip up the finished upright tower, any kind of resonances generated by blemishes where each area is linked would certainly influence the simulator efficiency and analysis high quality. We signed up with each tower area with an unique multigenerational approach of splicing, comparable to our long-travel gantry systems. These global splicing joints make it possible for smooth upright movement throughout the splices.
Z-axis automation for navigating
The movement system’s actuation is by hand run besides the Z-axis traveling, which is totally automated. Due to the high worth of space-going solar ranges such as this, it is much much better to by hand relocate axes of movement that have any kind of possibility of harming the range.
An electric-powered yank draws the whole system for huge motions, consisting of when the system is eliminated from or take into storage space. When the system is brought near the PPE solar range, great changes are made with bar arms connected to the system’s wheels. When the appropriate placement is accomplished, screw feet are reduced to the flooring.
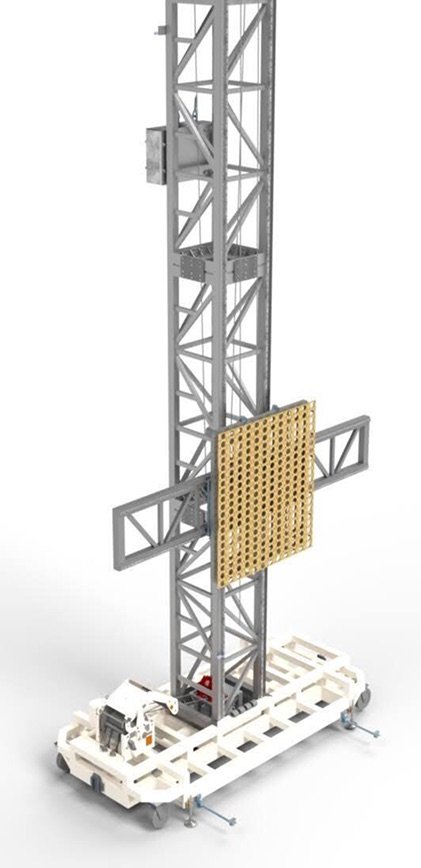
Completely created, the solar simulator tower gets to 3 tales. Right here, the pantographic morphing range is program in its six-by-six-foot setup. Resource: Bell-Everman
Electric system made to prevent fires
Due to the fact that the simulator residences 240 of the 500-watt pLEDss heads, a big difficulty of this task was handling over 120 kW of power.
Including several breakers and branches, the electric system is made to stop getting too hot and fire damages must shorts take place at any kind of degree.
Calibration system is different
To make certain that Angstrom Layouts’ programmable LED solar simulators (pLEDss) do effectively, they need to be adjusted versus solar battery criteria called isotypes.
We additionally made a calibration system for the PPE solar simulator to examination versus, including an I-format gantry that houses the solar battery isotypes.
Called the “Calibot,” this I-frame gantry robotic can adjusting the pLEDss heads while the system remains in either changing placement.

pLEDss heads have complete spooky control to existing suit joints for cells from solitary joint as much as 6 joints. Resource: Angstrom Layouts
When the Calibot is navigated to the pLEDss tester, control boxes are connected, and docking devices maintain the maximum standoff range throughout calibration. Both the PPE simulator system and the Calibot will certainly be saved with NASA in the exact same center.
The pantographic morphing range contains 3 smaller sized subarrays that each consist of 80 pLEDss heads. Each subarray has its very own incurable blocks and cords.
Each head’s DC power supply is supplied 220 VAC to permit the usage of smaller sized 18-gauge power cords. Due to the quantity of harnessing, it is essential to lower weight and area for the almost 400 cords going to the breaker boxes.
Based upon the very early I-format gantry layout– which required to make a U-turn around the assistance scaffold holding 2 solar ranges, a flooring placed wire track and an overview system– the overall price for the power distribution alone was approximated to be about $200,000.
Many thanks to the mobile-robot gantry layout with easy expansion rope, this cost was decreased to $6,000 and just 150 feet of wire.
The whole task can have been completed with a big, track-based I-format gantry. However Bell-Everman streamlined the layout with mobile gantry robotics, dramatically minimizing system intricacy and prices.

I-Form direct robotics including ServoBelt Linear actuators succeed at point-to-point movement control. Resource: Bell-Everman
发布者:Robot Talk,转转请注明出处:https://robotalks.cn/robots-raise-the-bar-for-artemis-programs-ppe-solar-array-simulation-frame/