
Depth thought helps mimic natural spatial consciousness by figuring out how some distance or close objects are, which makes it helpful for 3D imaging techniques. Gain educated insights on how depth thought works, the cues enthusiastic, as effectively because the varied styles of depth sensing cameras.
Prabu Kumar | e-con Programs
Realizing depth thought in human imaginative and prescient affords the root for developing 3D imaging techniques that mimic natural spatial consciousness. Depth thought is the capacity to account for spatial relationships and decide how some distance or close objects are relative to the observer. It kinds the premise for 3D imaging and 3D camera applied sciences, which emulate this thought thru optics and computational objects.
In this weblog, you’ll bag educated insights on how depth thought works, the varied styles of depth sensing cameras and more.
First, let’s perceive the cues enthusiastic.
Forms of Depth Concept Cues
Humans rely on two cues for depth thought: binocular cues and monocular cues.
1) Binocular cues
Binocular cues work through the use of every eyes to bag depth files. This form of thought is crucial for conception distances, shapes, and the relative positioning of objects in a 3-d function.
Let’s now perceive the three guidelines enthusiastic:
Stereopsis (or binocular parallax)
It refers again to the classy variations in photos perceived by the left and true eyes due to their spatial separation, which is known as parallax. The mind processes these variations to generate a vogue of depth. When an object is noticed from two rather varied views (as captured by the 2 eyes), its region appears to shift against the background as shown under.
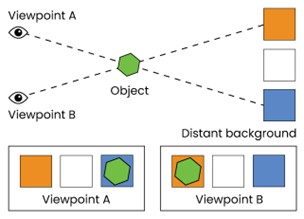

Figure 1: Binocular Parallax
The stereopsis theory is utilized in devices esteem stereoscopic cameras and 3D cinema projection techniques, where two separate views are blended to kind a thought of depth.
Convergence
It’s miles the inward movement of the eyes when focusing on a close-by object. The mind makes utilize of the extent of muscular effort interested in watch movement to estimate proximity. So, the extent to which the eyes turn inward affords facts about the article’s distance. Convergence is mimicked in certain optical techniques that need true focal level adjustments for come-field matters.
Shadow stereopsis
It entails the interpretation of shadows as depth indicators. While now not a serious binocular cue, this enhances depth thought by adding layers of facts about object orientation and distance. So, when shadows solid by an object shift otherwise between the left and true eyes, this differential can also additionally be interpreted to calculate spatial depth.
2) Monocular cues
Monocular cues derive depth files from a single watch. These encourage distant objects or in eventualities where binocular imaginative and prescient is unavailable. Monocular cues are integral to many imaging techniques that simulate depth thought.
Let’s explore on the procedure of monocular cues:
Motion parallax
Motion parallax describes the apparent relative movement of objects when the observer strikes. Objects closer to the observer transfer faster than these farther away. Hence, because the viewpoint adjustments, objects at varying distances shift relative to one yet another, providing crucial depth files even with one watch closed.
Figure 2: Motion Parallax
Motion parallax is the premise of functions esteem depth sensing in augmented reality AR or VR.
Occlusion
Occlusion occurs when one object in part obscures one other, indicating that the obscured object is farther away. So, the mind robotically interprets overlapping objects as having particular spatial positions. Many 3D imaging techniques utilize occlusion-essentially based completely algorithms for rendering lifelike scenes, specifically in layered visuals.
Familiar size
The mind leverages prior files of an object’s size to estimate its distance. Shall we embrace, a smaller-than-anticipated image of a identified object means that it is miles farther away.
Texture gradient
As objects proceed into the distance, their texture turns into denser and much less distinguishable. It helps build depth thought for genuine surfaces.
Lighting fixtures and shading
Light and shadow interactions offer clues about the depth and orientation of objects. Their region, form, and depth change with the sunshine source and object region, providing treasured depth files.
Feature of Parallax in 3D Imaging
Merely build, parallax makes it imaginable to kind depth for 3D imaging techniques. It helps dangle and analyze the disparity within the apparent region of objects from varied viewpoints. That formulation, cameras and imaging devices can easily reconstruct spatial files.
Forms of Depth Sensing Cameras
1) Stereo imaginative and prescient cameras
Stereo imaginative and prescient cameras operate on guidelines akin to human binocular imaginative and prescient, where two lenses, separated by a mounted baseline, dangle rather offset photos of the identical scene. The machine makes utilize of triangulation to compute depth by inspecting the disparities between the 2 photos. This disparity is inversely connected to the article’s distance from the cameras; closer objects consequence in higher disparities, main to more true depth estimates. The following blueprint illustrates how stereo cameras utilize baseline (b), focal length (f), and image disparities (ul, ur) to calculate depth (Zp) for a level P in 3D function
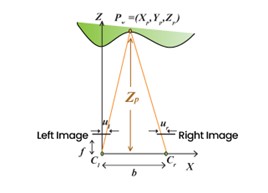
Figure 3: Tips late Stereo Camera Depth Sensing
A major enlighten in stereo imaginative and prescient is the baseline b, which impacts depth accuracy. Growing the baseline enhances precision but introduces challenges, akin to lacking files for objects viewed to absolutely one camera. Even in advanced industrial stereo setups, the photos captured by the 2 cameras might maybe maybe now not be perfectly aligned. Such misalignment necessitates calibration to compute two objects of parameters.
- Extrinsic parameters, which portray the spatial relationship between the cameras
- Intrinsic parameters, which detail the optical properties of every lens, including focal length and distortion.
Manual Disparity Calculation

Figure 4: Stereo Imaginative and prescient – Depth Calculation The utilize of Image Disparities
Theoretically formula for calculating depth:
z =(f *m*b)/d
where
f – focal length ,
b – infamous line,
m – pixels per unit length
d- disparity
Instance Calculation:
f = 0.0028 m, b = 0.12 m
Sensor size =1/3“ = 1/3 * 0.0254 =0.00847 m
m = sqrt(2208 ^2 + 1242 ^2) /0.00847 m = 299095.985 m
Every camera dedication: 2208*124
Pixel Coordinates:
Pixel co ordinate in the starting up image (1340,663)
Pixel co ordinate of 2d image (3515,663)
Disparity Calculation:
Subtracting a similar pixel from concatenated image (3515-2208) =1307
Disparity worth between a similar pixel is 1340 -1307 = 33 pixels
Depth Calculation:
Making utilize of the worth to the formula
z = (0.0028 * 299095.985 * 0.12) /33 = 3.04 m
Stereo imaginative and prescient cameras are old in self sufficient automobiles and robots, as effectively as industrial automation techniques. They’re valued for their simplicity and skill to generate excessive-dedication depth maps, though they require cautious calibration and are most efficient at closer ranges.
2) Time-of-Flight (ToF) cameras
Time-of-flight cameras rob a selected formulation by evaluating the right time the sunshine takes to commute to an object and then help. It calculates depth utilizing the formula
d= cΔT/2
- c is the creep of gentle
- ΔT is the time prolong between the emission and reception of the sunshine pulse.
ToF techniques are identified for their precision and suitability for dynamic scenes.
A typical ToF camera setup comprises three procedure:
- Sensor module
- Light source
- Depth sensor
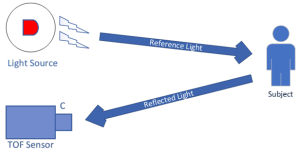
Figure 5: Illustration of ToF Camera measuring Depth
The sensor module measures the mirrored gentle, whereas the sunshine source, on the entire operating within the infrared spectrum, illuminates the scene. The depth sensor captures files for every pixel within the scene, producing a depth way. This depth way can also additionally be visualized as a 3-d level cloud, where every level represents a selected spatial predicament.
ToF cameras are excellent for functions requiring hastily depth measurements, akin to gesture recognition, augmented reality techniques, and self sufficient navigation. While their capacity to take hang of depth files for every pixel in right time, their efficiency can also degrade in extremely reflective or absorptive surfaces that ask algorithmic corrections.
3) Structured Light Cameras
Structured gentle cameras utilize a formulation where the scene is illuminated with a identified geometric pattern, akin to a grid or stripe. The pattern is projected onto the outside, and the distortions introduced on by the outside geometry are analyzed to compute depth. It ensures extremely true depth measurements in managed environments.
In disagreement to stereo or ToF cameras, structured gentle techniques calculate depth sequentially, illuminating one level at a time across a two-dimensional grid. While this affords detailed depth files, the sequential nature of the process limits its creep. As a consequence, these cameras are now not upright for dynamic scenes and are easiest old in functions esteem quality withhold watch over in manufacturing or static 3D scanning.
A huge profit of structured gentle cameras is their capacity to present excessive depth accuracy in effectively-lit, static stipulations. Nonetheless, they’re tender to environmental factors akin to ambient gentle and object reflectivity, which can hang an impact on files reliability.
e-con Programs Provides Slicing-Edge 3D Cameras
Since 2003, e-con Programs has been designing, developing, and manufacturing OEM camera solutions. Our DepthVista camera sequence aspects the most fresh 3D cameras in step with Time-of-Flight technology.
These ToF cameras can operate within the route of the NIR spectrum (850nm/940nm) and bring excessive-quality 3D imaging for indoor or out of doors environments. They’re succesful of constructed-huge processing for providing right-time 2D and 3D files output, which makes them excellent for functions esteem self sufficient robots, self-utilizing agricultural equipment, medical monitoring devices, and facial recognition techniques.
e-con Programs’ DepthVista camera sequence helps interfaces esteem USB, MIPI, and GMSL2, and is derived. They advance with drivers and SDKs esteem minded with NVIDIA Jetson AGX ORIN/AGX Xavier platforms and X86-essentially based completely techniques.
Prabu Kumar is the Chief Technology Officer and Head of Camera Products at e-con Programs, and is derived with a rich expertise of upper than 15 years within the embedded imaginative and prescient function. He brings to the table a deep files in USB cameras, embedded imaginative and prescient cameras, imaginative and prescient algorithms and FPGAs. He has constructed 50+ camera solutions spanning various domains akin to medical, industrial, agriculture, retail, biometrics, and more. He also comes with expertise in tool driver vogue and BSP vogue. At the 2d, Prabu’s focal level is to manufacture natty camera solutions that vitality new age AI essentially based completely functions.
The lisp & opinions in this text are the author’s and kind now not necessarily signify the views of RoboticsTomorrow
Comments (0)
This post would now not hang any comments. Be the first to leave a observation under.
Submit A Comment
It be crucial to be logged in sooner than you might maybe maybe post a observation. Login now.
Featured Product

Helios™2 Ray Time-of-Flight Camera Designed for Unmatched Performance in Originate air Lighting fixtures Stipulations
The Helios2 Ray camera is powered by Sony’s DepthSense IMX556PLR ToF image sensor and is specifically engineered for distinctive efficiency in hard out of doors lighting environments. Equipped with 940nm VCSEL laser diodes, the Helios2 Ray generates right-time 3D level clouds, even in negate sunlight, making it upright for a big selection of out of doors functions. The Helios2 Ray affords the identical IP67 and Factory Advanced™ hang because the conventional Helios2 camera that gains a 640 x 480 depth dedication at distances of up to eight.3 meters and a body price of 30 fps.
发布者:Deborah Cole in Berlin,转转请注明出处:https://robotalks.cn/the-ultimate-guide-to-depth-perception-and-3d-imaging-technologies-roboticstomorrow/