
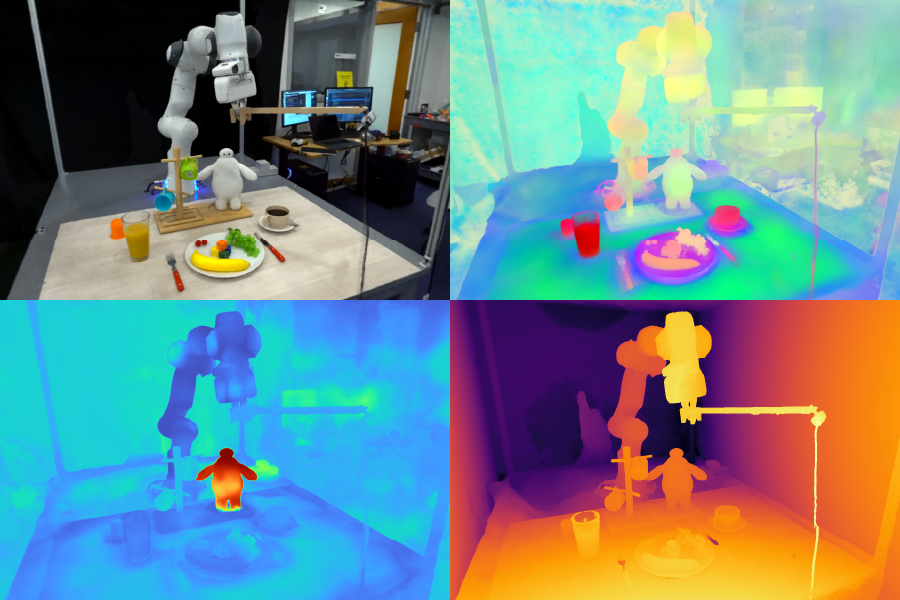

Function Area for Robotic Control (F3RM) makes it possible for robotics to analyze flexible message triggers making use of all-natural language, assisting the equipments adjust strange things. The system’s 3D attribute areas can be practical in atmospheres which contain countless things, such as storehouses. Photos thanks to the scientists.
By Alex Shipps|MIT CSAIL
Picture you’re seeing a good friend abroad, and you look inside their refrigerator to see what would certainly create an excellent morning meal. A number of the things originally show up international to you, with every one enclosed in strange product packaging and containers. Regardless of these aesthetic differences, you start to recognize what every one is made use of for and select them up as required.
Motivated by human beings’ capability to take care of strange things, a team from MIT’s Computer technology and Expert System Research Laboratory (CSAIL) created Function Area for Robotic Control (F3RM), a system that mixes 2D photos with structure design includes right into 3D scenes to aid robotics recognize and comprehend close-by things. F3RM can analyze flexible language triggers from human beings, making the technique practical in real-world atmospheres which contain countless things, like storehouses and homes.
F3RM provides robotics the capability to analyze flexible message triggers making use of all-natural language, assisting the equipments adjust things. Therefore, the equipments can recognize less-specific demands from human beings and still finish the wanted job. For instance, if an individual asks the robotic to “get a high cup,” the robotic can find and order the product that finest fits that summary.
” Making robotics that can really generalise in the real life is exceptionally hard,” claims Ge Yang, postdoc at the National Scientific Research Structure AI Institute for Expert System and Basic Communications and MIT CSAIL. “We actually wish to identify exactly how to do that, so with this job, we attempt to promote a hostile degree of generalization, from simply 3 or 4 challenge anything we discover in MIT’s Stata Facility. We wished to find out exactly how to make robotics as versatile as ourselves, because we can comprehend and position things despite the fact that we have actually never ever seen them previously.”
Understanding “what’s where by looking”
The technique can help robotics with selecting things in huge gratification facilities with unavoidable mess and changability. In these storehouses, robotics are commonly offered a summary of the stock that they’re called for to recognize. The robotics have to match the message given to an item, despite variants in product packaging, to make sure that consumers’ orders are delivered appropriately.
For instance, the gratification facilities of significant on the internet stores can include countless things, a number of which a robotic will certainly have never ever experienced prior to. To run at such a range, robotics require to recognize the geometry and semiotics of various things, with some remaining in limited rooms. With F3RM’s sophisticated spatial and semantic understanding capabilities, a robotic can end up being much more reliable at situating an item, putting it in a container, and after that sending it along for product packaging. Inevitably, this would certainly aid manufacturing facility employees deliver consumers’ orders much more effectively.
” One point that commonly shocks individuals with F3RM is that the exact same system additionally services a space and structure range, and can be made use of to construct simulation atmospheres for robotic discovering and huge maps,” claims Yang. “However prior to we scale up this job better, we wish to initially make this system job actually quickly. By doing this, we can utilize this kind of depiction for even more vibrant robot control jobs, ideally in real-time, to make sure that robotics that take care of even more vibrant jobs can utilize it for understanding.”
The MIT group keeps in mind that F3RM’s capability to recognize various scenes can make it valuable in metropolitan and house atmospheres. For instance, the technique can aid tailored robotics recognize and get details things. The system help robotics in understanding their environments– both literally and perceptively.
” Aesthetic understanding was specified by David Marr as the trouble of understanding ‘what is where by looking,'” claims elderly writer Phillip Isola, MIT associate teacher of electric design and computer technology and CSAIL primary detective. “Current structure versions have actually obtained actually proficient at understanding what they are considering; they can acknowledge countless things classifications and offer in-depth message summaries of photos. At the exact same time, glow areas have actually obtained actually proficient at standing for where things remains in a scene. The mix of these 2 strategies can produce a depiction of what is where in 3D, and what our job reveals is that this mix is specifically valuable for robot jobs, which call for controling things in 3D.”
Producing a “electronic double”
F3RM starts to recognize its environments by taking photos on a selfie stick. The installed cam breaks 50 photos at various postures, allowing it to construct a neural radiance field (NeRF), a deep discovering technique that takes 2D photos to create a 3D scene. This collection of RGB images develops a “electronic double” of its environments in the type of a 360-degree depiction of what neighbors.
Along with an extremely in-depth neural glow area, F3RM additionally develops a function area to enhance geometry with semantic details. The system utilizes CLIP, a vision structure design educated on numerous countless photos to effectively find out aesthetic principles. By rebuilding the 2D CLIP functions for the photos taken by the selfie stick, F3RM successfully raises the 2D includes right into a 3D depiction.
Maintaining points flexible
After getting a couple of demos, the robotic uses what it finds out about geometry and semiotics to comprehend things it has actually never ever experienced prior to. When an individual sends a message inquiry, the robotic undergo the room of feasible understandings to recognize those more than likely to prosper in getting the things asked for by the individual. Each possible alternative is racked up based upon its significance to the timely, resemblance to the demos the robotic has actually been educated on, and if it creates any type of crashes. The highest-scored understanding is after that picked and performed.
To show the system’s capability to analyze flexible demands from human beings, the scientists triggered the robotic to get Baymax, a personality from Disney’s “Big Hero 6.” While F3RM had actually never ever been straight educated to get a plaything of the animation superhero, the robotic utilized its spatial recognition and vision-language functions from the structure versions to determine which challenge comprehend and exactly how to select it up.
F3RM additionally makes it possible for customers to define which object they desire the robotic to take care of at various degrees of etymological information. For instance, if there is a steel cup and a glass cup, the individual can ask the robotic for the “glass cup.” If the crawler sees 2 glass cups and among them is full of coffee and the various other with juice, the individual can request for the “glass cup with coffee.” The structure design includes ingrained within the attribute area allow this degree of flexible understanding.
” If I revealed an individual exactly how to get a cup by the lip, they can conveniently move that expertise to get things with comparable geometries such as bowls, determining beakers, and even rolls of tape. For robotics, attaining this degree of versatility has actually been fairly difficult,” claims MIT PhD trainee, CSAIL associate, and co-lead writerWilliam Shen “F3RM integrates geometric understanding with semiotics from structure versions educated on internet-scale information to allow this degree of hostile generalization from simply a handful of demos.”
Shen and Yang created the paper under the guidance of Isola, with MIT teacher and CSAIL primary detective Leslie Load Kaelbling and undergraduate trainees Alan Yu and Jansen Wong as co-authors. The group was sustained, partly, by Amazon.com Providers, the National Scientific Research Structure, the Flying Force Workplace of Scientific Research Study, the Workplace of Naval Study’s Multidisciplinary College Campaign, the Military Research Study Workplace, the MIT-IBM Watson Laboratory, and the MIT Pursuit for Knowledge. Their job will certainly exist at the 2023 Seminar on Robotic Understanding.
发布者:MIT News,转转请注明出处:https://robotalks.cn/using-language-to-give-robots-a-better-grasp-of-an-open-ended-world/