
Robots from across the field, including this robot from Google, are sharing info on object manipulation to serve work in opposition to a approved motive robotic mind.
The generative AI revolution embodied in tools like ChatGPT, Midjourney, and various others is at its core based on a straightforward diagram: Defend shut a unquestionably great neural network, prepare it on a mammoth dataset scraped from the Web, after which use it to meet a large fluctuate of user requests. Trim language devices (LLMs) can answer questions, write code, and spout poetry, while image-generating programs can create convincing cave art work or up to the moment art.
So why haven’t these wonderful AI capabilities translated into the categories of helpful and broadly necessary robots we’ve considered in science fiction? Where are the robots that could neat off the desk, fold your laundry, and possess you breakfast?
Sadly, the extremely profitable generative AI diagram—great devices educated on hundreds Cyber web-sourced info—doesn’t without concerns raise over into robotics, since the Cyber web isn’t any longer stuffed with robotic-interplay info within the same technique that it’s stuffed with text and photos. Robots want robot info to be taught from, and this info is continuously created slowly and tediously by researchers in laboratory environments for terribly particular tasks. No matter mammoth progress on robot-studying algorithms, without abundant info we mute can’t enable robots to compose true-world tasks (like making breakfast) exterior the lab. Maybe the most impressive outcomes continuously simplest work in a single laboratory, on a single robot, and in most cases involve simplest a handful of behaviors.
If the abilities of every robot are restricted by the level and energy it takes to manually educate it to compose a up to date process, what if we had been to pool together the experiences of many robots, so a up to date robot could well be taught from all of them proper now? We determined to give it a try. In 2023, our labs at Google and the University of California, Berkeley came in conjunction with 32 other robotics laboratories in North The US, Europe, and Asia to undertake the
RT-X project, with the diagram of assembling info, sources, and code to realize approved-motive robots a actuality.
Here is what we learned from the first phase of this effort.
How to create a generalist robot
Folks are a long way better at this more or much less studying. Our brains can, with rather observe, tackle what are unquestionably adjustments to our body notion, which occurs as soon as we get a instrument, recede a bicycle, or gather in a car. That is, our “embodiment” adjustments, but our brains adapt. RT-X is aiming for one thing equivalent in robots: to enable a single deep neural network to govern many totally different types of robots, a skill called wicked-embodiment. The anticipate is whether or no longer a deep neural network educated on info from a sufficiently great number of rather a couple of robots can be taught to “power” all of them—even robots with very rather a couple of appearances, physical properties, and capabilities. If that is so, this arrive could well doubtlessly unlock the vitality of great datasets for robotic studying.
The scale of this project is terribly great because it have to be. The RT-X dataset currently contains nearly 1,000,000 robotic trials for 22 types of robots, including many of perchance the most customarily ragged robotic palms on the market. The robots in this dataset compose a mammoth fluctuate of behaviors, including picking and placing objects, assembly, and unquestionably skilled tasks like cable routing. In complete, there are about 500 rather a couple of expertise and interactions with hundreds of rather a couple of objects. It’s the biggest open-offer dataset of true robotic actions in existence.
Surprisingly, we stumbled on that our multirobot info could be ragged with comparatively straightforward machine-studying programs, supplied that we observe the recipe of utilizing great neural-network devices with great datasets. Leveraging the same types of devices ragged in most novel LLMs like ChatGPT, we had been ready to prepare robot-control algorithms that enact no longer require any particular beneficial properties for wicked-embodiment. Very like a person can power a car or recede a bicycle utilizing the same mind, a mannequin educated on the RT-X dataset can merely gape what more or much less robot it’s controlling from what it sees within the robot’s grasp digital camera observations. If the robot’s digital camera sees a
UR10 industrial arm, the mannequin sends commands acceptable to a UR10. If the mannequin as a substitute sees a low-label WidowX hobbyist arm, the mannequin strikes it accordingly.
To take a look at the capabilities of our mannequin, 5 of the laboratories taking into account the RT-X collaboration every tested it in a head-to-head comparability in opposition to the absolute top control machine that they had developed independently for their very grasp robot. Every lab’s take a look at eager the tasks it became as soon as utilizing for its grasp analysis, which incorporated issues like picking up and transferring objects, opening doors, and routing cables via clips. Remarkably, the one unified mannequin supplied improved efficiency over every laboratory’s grasp simplest technique, succeeding on the tasks about 50 p.c more in most cases on moderate.
Whereas this result could seem surprising, we stumbled on that the RT-X controller could well leverage the assorted experiences of other robots to enhance robustness in rather a couple of settings. Even inner the same laboratory, whenever a robot makes an try a job, it finds itself in a rather rather a couple of teach, and so drawing on the experiences of other robots in other conditions helped the RT-X controller with pure variability and edge circumstances. Here are a couple of examples of the fluctuate of these tasks:
Building robots that could reason
Inspired by our success with combining info from many robot types, we next sought to review how such info can also even be incorporated proper into a machine with more in-depth reasoning capabilities. Complex semantic reasoning is onerous to be taught from robot info alone. Whereas the robot info can provide rather various
physical capabilities, more complex tasks like “Transfer apple between can and orange” also require knowing the semantic relationships between objects in an image, approved commonsense, and other symbolic info that’s no longer straight linked to the robot’s physical capabilities.
So we determined to add one other big offer of info to the combine: Cyber web-scale image and text info. We ragged an existing great vision-language mannequin that’s already proficient at many tasks that require some knowing of the connection between pure language and photos. The mannequin is similar to these within the market to the public equivalent to ChatGPT or
Bard. These devices are educated to output text in step with prompts containing images, allowing them to clear up concerns equivalent to visual anticipate-answering, captioning, and other open-ended visual knowing tasks. We stumbled on that such devices can also even be tailored to robotic control merely by coaching them to also output robot actions in step with prompts framed as robotic commands (equivalent to “Save the banana on the plate”). We applied this arrive to the robotics info from the RT-X collaboration.
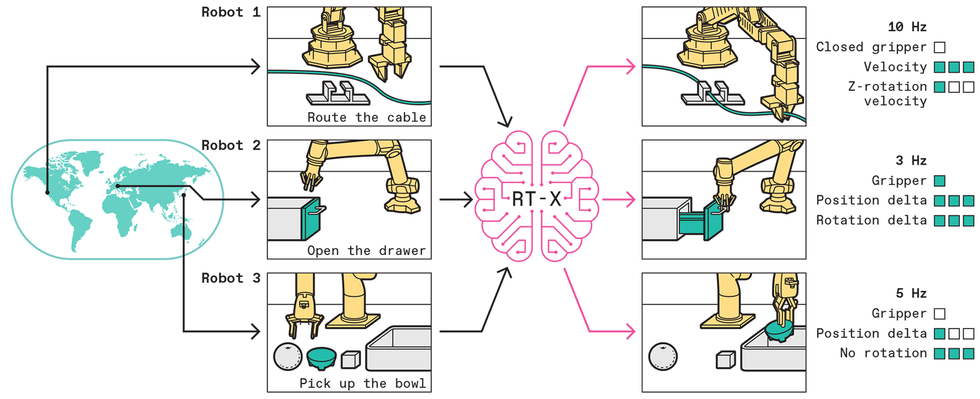
 The RT-X mannequin makes use of images or text descriptions of particular robot palms doing rather a couple of tasks to output a series of discrete actions that could enable any robot arm to enact these tasks. By collecting info from many robots doing many tasks from robotics labs across the field, we are constructing an open-offer dataset that could also even be ragged to coach robots to be in most cases necessary.Chris Philpot
The RT-X mannequin makes use of images or text descriptions of particular robot palms doing rather a couple of tasks to output a series of discrete actions that could enable any robot arm to enact these tasks. By collecting info from many robots doing many tasks from robotics labs across the field, we are constructing an open-offer dataset that could also even be ragged to coach robots to be in most cases necessary.Chris Philpot
To judge the combo of Cyber web-obtained smarts and multirobot info, we tested our RT-X mannequin with Google’s mobile manipulator robot. We gave it our hardest generalization benchmark assessments. The robot had to gape objects and efficiently manipulate them, and it also had to answer to complex text commands by making logical inferences that required integrating info from both text and photos. The latter isn’t any doubt one of many issues that possess other folks such ethical generalists. Might perchance we give our robots no longer decrease than a worth of such capabilities?
We performed two objects of reports. As a baseline, we ragged a mannequin that excluded all of the generalized multirobot RT-X info that didn’t involve Google’s robot. Google’s robot-particular dataset is certainly the biggest share of the RT-X dataset, with over 100,000 demonstrations, so the anticipate of whether the total other multirobot info would unquestionably serve in this case became as soon as very grand open. Then we tried again with all that multirobot info incorporated.
In no doubt one of perchance the most complex overview eventualities, the Google robot wished to realize a job that eager reasoning about spatial relatives (“Transfer apple between can and orange”); in a single other process it had to clear up rudimentary math concerns (“Pickle an object on top of a paper with the diagram to ‘2+3’”). These challenges had been intended to verify the well-known capabilities of reasoning and drawing conclusions.
In this case, the reasoning capabilities (such because the meaning of “between” and “on top of”) came from the Web-scale info incorporated within the coaching of the vision-language mannequin, while the capability to ground the reasoning outputs in robotic behaviors—commands that if truth be told moved the robot arm within the intellectual course—came from coaching on wicked-embodiment robot info from RT-X. An example of an overview where we asked the robot to compose a job no longer incorporated in its coaching info is confirmed within the video below.
Even without particular coaching, this Google analysis robot is ready to observe the instruction “switch apple between can and orange.” This skill is enabled by RT-X, a well-known robotic manipulation dataset and the 1st step in opposition to a approved robotic mind.
Whereas these tasks are rudimentary for parents, they teach a serious teach for approved-motive robots. Without robotic demonstration info that clearly illustrates ideas like “between,” “shut to,” and “on top of,” even a machine educated on info from many totally different robots would no longer be ready to determine out what these commands imply. By integrating Web-scale info from the vision-language mannequin, our full machine became as soon as ready to clear up such tasks, deriving the semantic ideas (in this case, spatial relatives) from Cyber web-scale coaching, and the physical behaviors (picking up and transferring objects) from multirobot RT-X info. To our shock, we stumbled on that the inclusion of the multirobot info improved the Google robot’s capability to generalize to such tasks by a a part of three. This result suggests that no longer simplest became as soon as the multirobot RT-X info necessary for shopping rather various physical expertise, it could perchance well also serve to raised connect such expertise to the semantic and symbolic info in vision-language devices. These connections give the robot a stage of commonsense, which could well one day enable robots to diagram shut the meaning of complex and nuanced user commands like “Raise me my breakfast” while finishing up the actions to know it happen.
The following steps for RT-X
The RT-X project presentations what’s that you simply might want to be ready to mediate of when the robot-studying community acts together. As a result of this wicked-institutional effort, we had been ready to position together a various robotic dataset and possess complete multirobot reports that wouldn’t be that you simply might want to be ready to mediate of at any single institution. For the reason that robotics community can’t depend on scraping the Cyber web for coaching info, now we want to create that info ourselves. We hope that more researchers will make contributions their info to the
RT-X database and be half of this collaborative effort. We also hope to provide tools, devices, and infrastructure to make stronger wicked-embodiment analysis. We notion to head past sharing info across labs, and we hope that RT-X will develop proper into a collaborative effort to construct info standards, reusable devices, and contemporary ways and algorithms.
Our early outcomes rate at how great wicked-embodiment robotics devices could well transform the sphere. Valuable as great language devices like mastered a well-known sequence of language-based tasks, within the long hotfoot we would use the same foundation mannequin because the belief for various true-world robotic tasks. In all probability contemporary robotic expertise could be enabled by beautiful-tuning or even prompting a pretrained foundation mannequin. In a equivalent technique to the technique you might want to be ready to urged ChatGPT to portray a yarn without first coaching it on that particular person yarn, you might want to well perchance search info from a robot to write down “Contented Birthday” on a cake with no have to portray it straightforward programs to use a piping get grasp of or what handwritten text appears like. Obviously, draw more analysis is wished for these devices to rob on that more or much less approved skill, as our experiments like centered on single palms with two-finger grippers doing straightforward manipulation tasks.
As more labs engage in wicked-embodiment analysis, we hope to extra push the frontier on what’s that you simply might want to be ready to mediate of with a single neural network that could control many robots. These advances could consist of including diverse simulated info from generated environments, coping with robots with rather a couple of numbers of palms or fingers, utilizing rather a couple of sensor suites (equivalent to depth cameras and tactile sensing), and even combining manipulation and locomotion behaviors. RT-X has opened the door for such work, but perchance the most stress-free technical traits are mute ahead.
Here is proper the starting. We hope that with this first step, we can together create the technique forward for robotics: where approved robotic brains can vitality any robot, taking good thing about info shared by all robots across the field.
This text appears within the February 2024 print teach as “The Global Mission to Compose a Overall Robotic Brain.”
发布者:Dr.Durant,转转请注明出处:https://robotalks.cn/the-global-project-to-make-a-general-robotic-brain/